
[2024/11/11]
659KB
柱一本を全自動で溶接 新型のマニピュレータ型現場溶接ロボットを実導入
ボタン1つで計測、溶接、スラグ除去の一連作業を全自動化
鹿島(社長:天野裕正)は、溶接量が多い大型鉄骨柱を主な対象として、柱の全周溶接に伴う一連の繰り返し作業を全自動化する新型の「マニピュレータ(多関節型アーム)型現場溶接ロボット」(以下、本ロボット)を開発し、工事に実導入しました。本ロボットは、今回新たに開発した「開先※1センシング機能」と「スラグ※2除去機能」を、2020年に開発した溶接ロボット(以下、従来型ロボット)に実装したものです。
鉄骨柱の溶接は、厚みのある部材の繋ぎ目を埋めるために、柱全周にわたり複数層の溶接を繰り返す必要があります。従来型ロボットでは、柱全周(1層)を溶接するたびに技能者がスラグを取り除く必要がありましたが、スラグ除去機能の追加により手作業がゼロになりました。本ロボットは、開先形状計測、溶接、スラグ除去の一連のフローを最終層まで全自動で繰り返すことができるため、昼夜連続作業が可能となるほか、技能者が作業中のロボットから離れ、同時に複数台のロボットを運用するなど他の作業を行うことが可能です。
今般、横浜市内の当社施工中ビルにおいて、一部の大型鉄骨柱の溶接に本ロボットを実導入しました。その結果、熟練技能者と同等以上の高い品質を確保しながら、柱1本の全自動溶接を実現できることを確認しました。
鹿島は今後、本ロボットのさらなる改良を進め、鉄骨柱の現場溶接作業における生産性向上を図ります。
※1 部材同士を繋ぎ合わせるために、溶接材料で埋める隙間
※2 溶接時に表面に発生する不純物
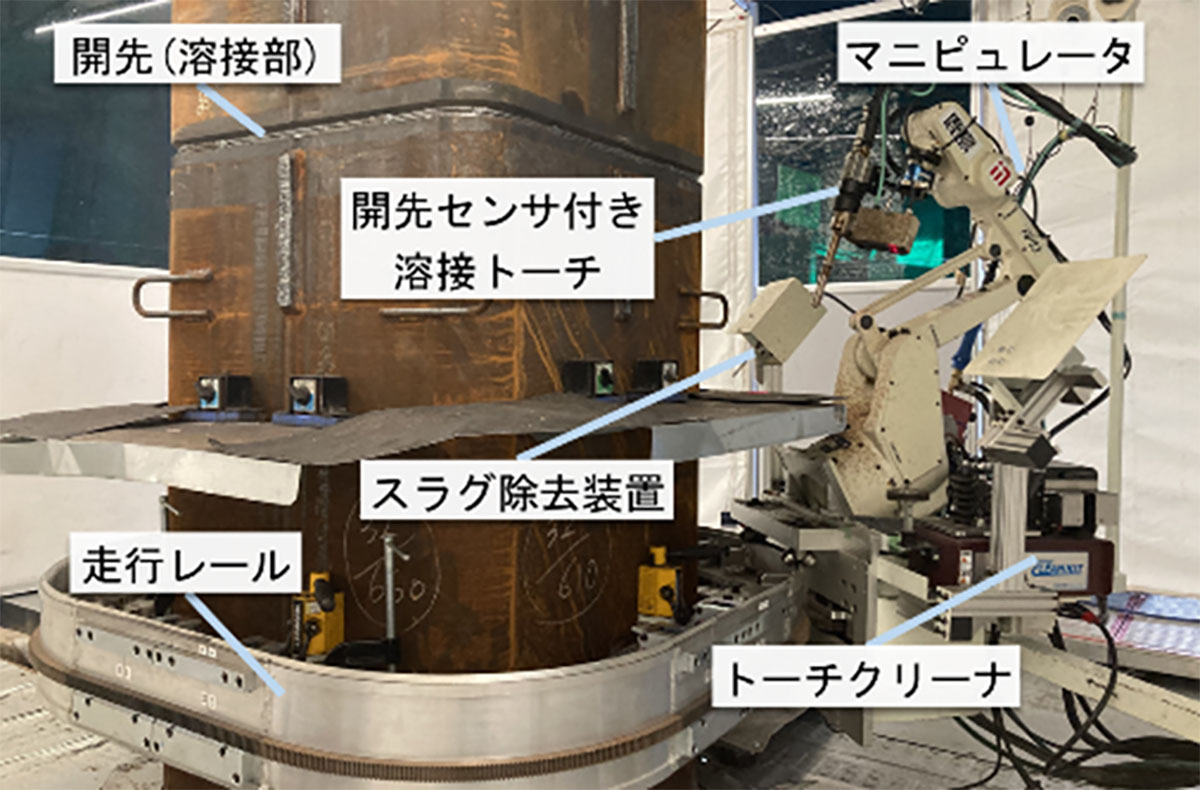
新型のマニピュレータ型現場溶接ロボット
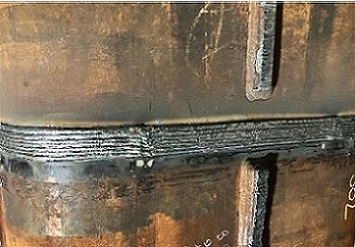
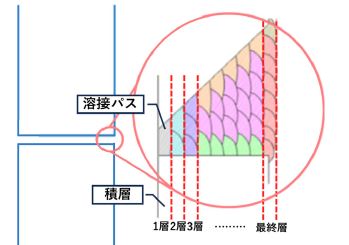
全周溶接を複数層繰り返し、柱1本を溶接
開発の背景
当社が推進する「鹿島スマート生産」では、「作業の半分はロボットと」をコアコンセプトの一つに位置付け、繰り返しの単純作業や、自動化により施工の効率化や品質の向上が図れる作業などを対象に、自動化・ロボット化を進めています。
また、熟練技能者の高齢化ならびに若年層の入職者数の減少により、建物の骨組みとなる鉄骨の現場溶接作業を担う、高度な技術を有する技能者の不足が懸念されています。一方、溶接量が多い大型鉄骨柱を有する超高層ビルの建設は今後も多数計画されており、その対策が求められています。
そこで、高い品質を確保しながら、柱1本の溶接に係る一連の繰り返し作業を全自動化すべく、従来型ロボットの改良を進めてきました。
本ロボットの概要と特長
また、ロボット運用における安全対策に加え、風雨を防いで溶接品質を確保するためのユニット養生設備や、ロボットを移設するための運搬設備、走行レールの分割機構も併せて改良し、本ロボットの運用における付随作業を大幅に効率化しました。
※3 開先を埋めるために必要な溶接線の数
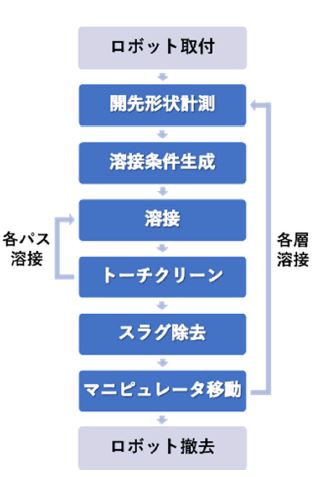
全自動溶接のフロー
柱周囲に設置した走行レール上を6軸マニピュレータが移動しながら、柱全周を8ブロックに分けて自動で溶接します。スタートボタンを押すだけで、マニピュレータが開先形状計測、溶接、スラグ除去と移動を最終層まで繰り返し、柱1本を全自動で溶接できます。マニピュレータは複雑な動きが可能であり、一般的な箱型の現場溶接ロボットでは難しいとされる柱角部の連続溶接にも対応できるため、角形鋼管柱(BOX柱)の全自動溶接も可能です。
マニピュレータにはツールチェンジャ機能を実装しており、溶接ツール(溶接トーチ+開先計測センサ)とスラグ除去ツールを自動で持ち替えながら作業を行います。
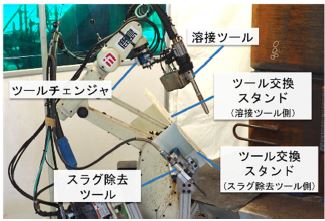
ツールチェンジャ機能の外観
■開先センシング機能
現場では、柱溶接部の開先形状を柱ごとに計測し、各形状に応じた溶接条件を生成する必要があります。今回新たに、開先センシング機能を開発・実装したことで、溶接部の開先形状を自動計測し、計測結果に応じた溶接条件を熟練技能者のノウハウに基づいた当社独自のアルゴリズムを用いて自動生成できるようになりました。
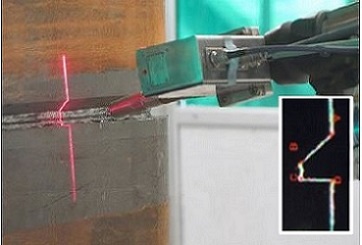
開先形状計測の様子
柱溶接部の開先形状に応じた溶接条件を生成
■スラグ除去機能

スラグ除去の様子
本ロボットの工事への実導入
※4 超音波を用いて溶接内部の欠損の有無を調べるもの
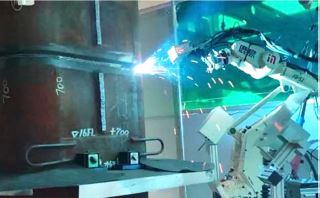
溶接の様子
今後の展開
鹿島は今後、本ロボットによる溶接時間の短縮などを行うとともに、厚板や超大型鉄骨柱、狭開先などにも対応できるよう、より一層の機能向上を図ります。また、技能者が複数の溶接ロボットを並行運用できる体制を確立することで、鉄骨柱の現場溶接作業のさらなる省人化を図るとともに、生産性向上にも貢献していきます。併せて、引き続き、「鹿島スマート生産ビジョン」に基づき、ICTを活用したロボット技術の開発と現場管理手法の革新を進め、より魅力的な建築生産プロセスの実現を目指してまいります。
紹介映像
(参考)
建築の生産プロセスを変革する「鹿島スマート生産ビジョン」を策定
(2018年11月12日プレスリリース)
マニピュレータ型現場溶接ロボットを開発、実工事に初適用
(2020年3月25日プレスリリース)
プレスリリースに記載された内容(価格、仕様、サービス内容等)は、発表日現在のものです。
その後予告なしに変更されることがありますので、あらかじめご了承ください。
