










A4CSEL®
(クワッドアクセル)
建設機械の自動運転を核とした自動化施工システム
建設作業の多くは人の手に頼ってきましたが、ここ数年、熟練技能者不足と高齢化だけでなく建設業就業者全体の大幅な減少傾向が続いています。また、年々減少しているものの労働災害件数の全産業における発生率は依然高い状態にあります。
これらの課題・問題の解決には生産性と安全性を飛躍的に向上させる施工システムが必要と考え、鹿島は、作業指示を送ることで、自動化された建設機械が自律・自動運転を行い、必要最小限の人員で多数の機械を同時に稼働させることをコンセプトとした、次世代の建設生産システムを実現しました。
A4CSEL(Automated / Autonomous / Advanced / Accelerated Construction system for Safety , Efficiency , and Liability)は、従来のリモコン等による建設機械の遠隔操作とは異なり、人間が複数の自動化建設機械に作業計画を送信することにより、無人で自動運転を行うものです。
第9回ロボット大賞 優秀賞
国土技術開発賞二〇周年記念大賞
平成30年度日本建設機械施工大賞 大賞部門最優秀賞
第19回国土技術開発賞 最優秀賞
平成28年度土木学会賞 技術開発賞
第46回日本産業技術大賞 文部科学大臣賞
特許登録済

A4CSELのダム堤体での施工イメージ
詳しくはこちらの特設サイトをご覧ください。
(別ウィンドウが開きます![]() )
)

関連情報
- キーワード
- 自動化、振動ローラ、ブルドーザ、ダンプトラック、ダム工事、生産性、効率化
適用実績

成瀬ダム堤体打設工事(第1期・第2期)
場所:秋田県東成瀬村
工期:2018年5月~2026年12月
発注者:国土交通省東北地方整備局
規模:台形CSGダム
堤高114.5m 堤頂長755.0m 堤体積485万m3

小石原川ダム本体建設工事
場所:福岡県朝倉市・東峰村
竣工年:2021年3月
発注者:独立行政法人水資源機構
規模:中央コア型ロックフィルダム
堤高139m 堤頂長約550m 堤体積約830万m3

大分川ダム建設(一期・二期)工事
場所:大分県大分市
竣工年:2019年11月
発注者:国土交通省九州地方整備局
規模:中央コア型ロックフィルダム
堤高91.6m 堤頂長496.2m 堤体積378.1万m3

五ケ山ダム堤体建設工事
場所:福岡県那珂川市
竣工年:2018年3月
発注者:福岡県
規模:重力式コンクリートダム
堤高102.5m 堤頂長556m 堤体積93.5万m3
学会論文発表実績
- 「振動ローラの自動転圧システムの開発 ― RCD ダム施工での試験適用」,土木学会,第70回年次学術講演会,2015年
- 「ブルドーザの自動撒出しシステムの開発」,土木学会,第70回年次学術講演会,2015年
- “Next Generation Construction Production System Focusing on Automation Technologies of Construction Machines”,The 7th Civil Engineering Conference in the Asian Region(第7回アジア土木技術国際会議) Proceedings,2016年
- 「建設機械の走行制御と目標経路生成について」,第16回計測自動制御学会システムインテグレーション部門講演会,2015年
伐採作業無人化システム
「キッタロー君®」
運転席搭載型ロボットによる伐採作業の無人化施工システム
中間貯蔵施設の建設工事では、山林の伐採作業が多く発生することが予想されますが、山林は住宅地、道路と違い未除染区域であることから、重機オペレータの被ばく量低減が重要な課題です。
鹿島では、運転席に搭載するだけで様々な重機を遠隔操作できる人工筋肉ロボット「アクティブロボットSAM※1」と、伐採用アタッチメントである「フェラーバンチャザウルスロボ※2」を組み合わせた伐採用無人化施工システム「キッタロー君」をコーワテックと共同開発しました。
※1 コーワテックの製品
※2 松本システムエンジニアリングの製品

フェラーバンチャ仕様伐採重機
- キーワード
- 遠隔操縦、リモコン重機、人工筋肉ロボット、人工筋肉、伐採、伐倒、抜根、フェラーバンチャ、A-SAM、キッタロー君、
無人化、ロボット、ラジコン、自動化、建設機械
システムの概要
人工筋肉ロボット(A-SAM)は、搭載型の遠隔操縦ロボットで、重機の機種やメーカーに限定されることなく、運転席に搭載することで遠隔操縦を実現できます。人工筋肉とは、エアチューブに入れるエア圧力を制御し、エアチューブ膨張時の収縮を利用した機構です。
従来の伐採工事は、チェーンソーを使った手作業が主体でしたが、近年は機械化施工が進んでいます。伐採用アタッチメント(フェラーバンチャ)は、伐採工事で使う複数の作業を可能にするアタッチメントで、立木の伐倒、抜根、木材の移動、掘削、転圧の5つの機能を有しています。

人工筋肉ロボット(A-SAM)
フェラーバンチャの機能
システムの特長
人工筋肉ロボットによる遠隔操作
人工筋肉ロボットは、重量52kg程度で、3分割が可能で、運転席への設置も2名で1時間程度で行うことができます。また、リモコンでの遠隔操作については、目視並びにカメラ映像による操作が可能で、10分程度の練習で行うことができます。

リモコン及び運転操作状況(カメラ画像による運転)


遠隔操作の様子(動画:30秒/音あり)
伐採用アタッチメント(フェラーバンチャ)
フェラーバンチャはベースマシンとなる油圧ショベルのバケット部に装着するアタッチメントですが、伐採する木材をつかむ⇒切る⇒切ったまま把持⇒移動⇒集積まで、伐採工事で行う複数の作業を1台で行うことができ、作業の大幅な効率化が図れるとともに、オペレータの被ばく量を大幅に低減することができます。

人工筋肉ロボット(A-SAM)搭載の伐採重機運転状況

伐倒の様子(動画:30秒/音あり)
4ブームフルオートコンピュータジャンボによる
施工の合理化
専任のオペレータ1名によるせん孔作業を実現
山岳トンネルの現場では発破孔のせん孔位置合わせが自動で行えるドリルジャンボが導入されてきています。しかし、これまでのコンピュータジャンボは作業員がキャビン内の小型画面を見ながらブームを誘導しなければならず、作業員の熟練度に依存するとともに、1ブームあたり1名の作業員が必要でした。
そこで鹿島は、日本初となる4ブームフルオートコンピュータジャンボ(アトラス社製XE4C)を、新区界トンネル(岩手県)の本坑掘削に適用しました。
同機が持つフルオートせん孔機能により、専任オペレータ1名によるせん孔作業を実現し、最新鋭ドリフタの機能向上により、せん孔時間が2分の1以下に低減、また、余掘りも40%低減できることを確認しました。
令和元年度日本建設機械施工大賞 大賞部門最優秀賞

アトラス社製XE4C 4ブームフルオートコンピュータジャンボ
関連情報
- キーワード
- 急速施工、コンピュータジャンボ、フルオートせん孔
4ブームフルオートコンピュータジャンボの概要
従来のコンピュータジャンボは、作業員がキャビン内の画面を見ながらブームをせん孔位置に誘導しなければなりませんでしたが、この4ブームフルオートジャンボのフルオートせん孔機能は、あらかじめ入力したせん孔位置に機械が自動で位置合わせを行うため、作業員の熟練度に頼らないせん孔作業を実現するとともに、4ブームを1名のオペレータで操作することが可能となっています。また、同機は、これまでのジャンボに比べ、ドリフタのせん孔性能が向上し、純せん孔速度が最大で2倍となっているほか、地山の硬軟に応じて自動的に最適な打撃力に調整されるため、せん孔中の孔閉塞が発生しません。
さらに、搭載されているせん孔データの自動収集機能により、切羽前方やトンネル周辺の地山評価が可能です。

4ブームを1名の専任オペレータで操作が可能

4ブームフルオートコンピュータジャンボ(動画:23秒/音あり)
4ブームフルオートコンピュータジャンボ導入による効果
4つのブームを1名の専任オペレータで
従来は1ブームあたり1名の作業員が必要でしたが、フルオートジャンボは4つのブームを1名のオペレータで操作することができます。これまでは坑夫と呼ばれるトンネル作業員がせん孔時にはブーム操作を行っていましたが、専任のオペレータ1名が4つのブーム操作を行うため、他の作業員は次の作業の段取りなど、別な仕事を行うことができ、省力化と効率化が図れます。
せん孔に要する時間が従来の半分に
本機はこれまでのジャンボに比べ、ドリフタ(せん孔装置)の性能が向上し、純せん孔速度が最大で2倍となっていることと、せん孔位置への自動誘導機能により、位置合わせ時間が大幅に短縮できるため、せん孔時間が従来の半分以下になることを確認しました。
余掘りを40%低減
コンピュータの自動制御により、せん孔パターン通りの角度や長さで正確なせん孔を行うため、余堀りを40%低減できることを確認しました。
従来機の場合(誘導機能なし)
フルオートジャンボの場合
せん孔データの自動収集で地山を予測、
CIMにも活用
本機に搭載されているせん孔データの自動収集機能(Mesurements While Drilling:MWD)により、地山状況に応じてせん孔パターンを修正するとともに、切羽前方やトンネル周辺地山の予測評価が可能となることにより適切な支保パターンの選定が行えます。また、これらのデータを蓄積することにより、CIMの地質モデルへの反映ができます。
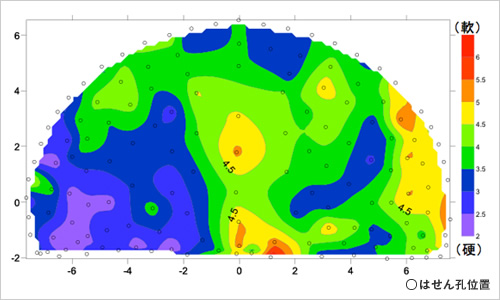
せん孔速度より求めた切羽前方地山の硬軟度分布
適用実績

宮古盛岡横断道路 新区界トンネル
場所:岩手県宮古市~盛岡市
竣工年:2019年8月
発注者:国土交通省東北地方整備局
規模:全体L=4,998m 内空断面積94.9m2
避難坑L=5,045m 内空断面積15.5m2

国道45号 白井地区道路工事
(白井トンネル)
場所:岩手県閉伊郡普代村
竣工年:2019年3月
発注者:国土交通省東北地方整備局
規模:延長2,059m 内空断面積95m2
セグメント自動搬送システム
地上から切羽までセグメントを自動で搬送
シールドトンネル工事では、近年更なる長距離化が進み、また、高速施工も進んでいます。そのため、鹿島では、セグメント自動搬送システムを開発、数多くの現場に導入しています。
これにより安定した搬送サイクルが確保できるだけでなく、安全性の向上、セグメント搬送の人員削減など大きな効果を上げています。
セグメントの自動組立システムと併せ、シールド工事の無人化・自動化に取り組んでいます。
特許登録済

- キーワード
- 自動搬送システム、バッテリロコ、タイヤ搬送、セグメントドーリー、セグメントセッタ、中央管理室
特長・メリットココがポイント
立坑内への搬送から切羽まで全自動搬送
立坑部には大型資材リフトを設置し、全自動のセグメントドーリーにより地上セッタからセグメントリフトを経由し、坑口に設置されたセグメントセッタまでの搬送を自動化しています。タイヤ式自動搬送システムと併せて、立坑内へのセグメント投入から切羽までの全自動搬送が可能となっています。

55tリフト(地上部)

セグメントドーリー

セグメントセッタ
中央管理室で自動運行を集中管理
各台車の位置は、ステーションごとに設置されているIDタグを台車が読み取り、無線により中央管理室に転送され、中央管理室では、坑内のすべての台車の位置を把握、管理することができます。

中央管理室
障害物センサなどで安全性を確保
台車の前後には障害物センサと障害物バンパを設置し、安全性を向上させています。また、坑口から1km付近に逸走防止装置を設置し、既定の速度を超えた場合に、搬送を停止できる安全機能を備えています。
タイヤ式とし、枕木設置を省略
中央環状品川線では、高速施工に対応するため、1リング分のセグメントを一括で高速運搬(時速10km)できるタイヤ式搬送台車を採用し、センター部のみに軌条を敷設するセンターレール方式にしました。これにより坑内への枕木設置を省略でき、工期、コストの短縮に寄与します。

センターレール及びタイヤ式による搬送状況
適用実績

中央環状線品川線
シールドトンネル(北行)工事
場所:東京都品川区~目黒区
工期:2007年2月~2013年2月
発注者:首都高速道路
規模:シールド外径Φ12.3m 掘進延長8,010m

東京電力 東西連携ガス
導管新設工事(富津工区)うち土木工事
場所:千葉県富津市~東京湾
工期:2003年4月~2008年3月
発注者:東京電力
規模:シールド外径Φ3.62m 掘進延長9,030m
学会論文発表実績
- 「大断面長距離シールドにおける月進400m高速施工への挑戦」,第7回日中シールド技術交流会,2013年9月
- 「長距離・大断面泥土圧式シールドの立坑部におけるトンネル大型資材搬入リフトの適用」,建設機械,2012年12月号,2012年12月
- 「大断面長距離シールドトンネルにおける高速施工の実績」,土木学会,第67回年次学術講演会,2012年9月
- 「泥土圧式シールド機による大断面、長距離シールド掘進 中央環状品川線」,第38回世界トンネル会議2012(タイ国 バンコック市),2012年5月
- 「中央環状品川線 約8kmの長距離・高速施工」,土木技術,2009年12月号,2009年12月
コンクリート注文・製造・管理の自動化システム
複数箇所の同時打設時のコンクリート注文・製造・管理を自動化
新桂沢ダムでは、4台のクローラクレーンにて複数ブロックを同時に昼夜打設し、コンクリートの運搬先が多岐にわたること等から、人為的ミスによるコンクリートの誤運搬が引き起こす打設遅延対策や打設間違いのリスク回避策が求められました。そこで、コンクリートの注文、製造、運搬、打設までの一連の管理をIoT、ICTを利用して「見える化」することによって、打設当番やコンクリート運搬車両の運転手、クレーンオペレータ、バッチャープラントオペレータ、JV職員が、いつでもどこでもコンクリートの注文、製造、運搬、打設状況を把握し確認できる「コンクリート注文・製造・管理の自動化システム」を開発、導入しました。その結果、今までにない管理形態と見える化によって誤運搬、打設間違いのリスクを回避でき、効率よく無駄のないコンクリート打設を行うことが可能となりました。
特許登録済
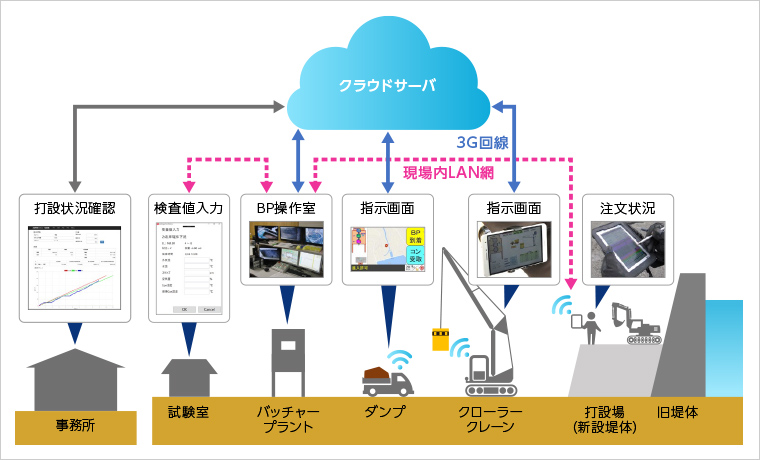
システム概念図
- キーワード
- コンクリート、バッチャープラント、コンクリート打設、運搬、品質管理、自動化、生産性向上、省力化
特長・メリットココがポイント
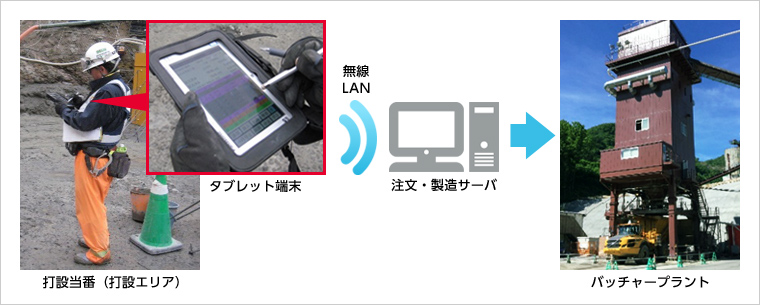
コンクリートの製造・運搬状況を正確に把握
複数の打設場に配置された打設当番がタブレット端末を用いて注文したコンクリート情報は、打設箇所に紐付けされた累計バッチ番号、配合、数量を表示したアイコンとなって計量→製造→積込→運搬→打設のそれぞれの状況においてデジタルデータ化されクラウドサーバーを利用して「見える化」し情報共有されます。
複数の打設場所からのコンクリートの注文や製造、運搬状況を一元管理し、リアルタイムで把握できるため、確認作業が大幅に減り生産性が飛躍的に向上します。
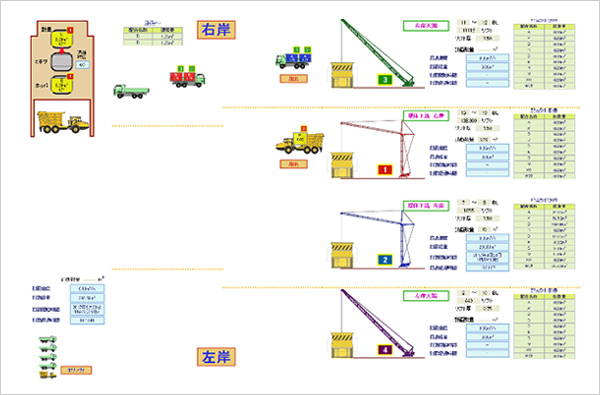
4か所での打設状況が一元管理され、生産性が飛躍的に向上
コンクリート打設業務の合理化・生産性の向上
従来、打設当番は無線や携帯電話によりコンクリートの注文を行ったり運搬状況を確認していましたが、本システムの導入により、コンクリートの注文・取消し・変更といった注文管理、製造有無や運搬状況、到着予定時刻等の確認に要していた時間が大幅に削減され、打設当番は打設作業により集中できます。さらに、注文したコンクリートの到着予定時刻を精度よく把握できるため、段取り替え、打設位置変更、配合変更などがより計画的に行えるようになりました。さらに打設記録もタブレット端末を用いて入力(プルダウンで定型コメント選択や自由コメント入力)できるようペーパーレス化機能を備えたことで、生産性が大きく向上しました。
コンクリート注文~製造イメージ図
タブレット端末によるコンクリート注文管理の合理化
注文したコンクリートがバッチャープラントで計量開始されるまで、いつでも注文の取消し、数量変更、一時停止や別注文の挿入といった注文指示がタブレット端末で行えます。事前計画した打設順序通りのコンクリート種別と数量を複数注文しておけば、自動的に製造・運搬が行われるため、打設当番はタブレットの注文管理画面を確認するだけで、注文したコンクリートの状況(未製造、製造済み、運搬中、打設済み)が一目で確認できます。打設当番が交代しても注文履歴は全て引き継がれます。
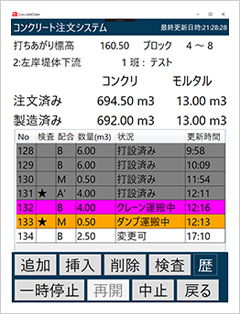
注文済みのコンクリート状況をリアルタイムに表示
クラウドサーバーを活用した打設進捗管理
打設当番がタブレット端末を用いて入力した打設開始日時、打設に使用するクレーン、打設ブロック番号、打設標高、打設計画数量、打設当番氏名や注文したコンクリートの配合、数量、製造時間、運搬開始時間、打設完了時間および品質試験室で実施した試験結果などは全てクラウドサーバーでデータを共有化しています。また、これらのデータを加工、自動計算、グラフ化した打設進捗等の結果や試験室の検査データも、いつでもどこでもJV職員や打設当番が確認することができます。
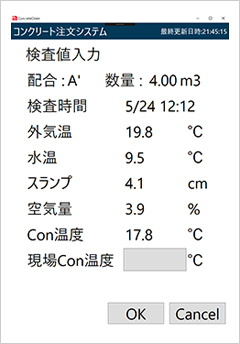
コンクリート品質管理システム画面(左)
- 品質試験室で実施した試験結果もタブレットで閲覧可能
- 現場で計測したコンクリート温度をタブレットで入力可能
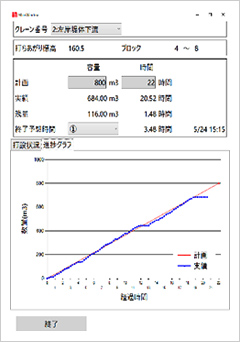
打設進捗管理画面(右)
- 打設速度(移動平均値)を表示
- 打設進捗は計画値と実績値をグラフで表示
- 打設終了予測時間も自動計算
コンクリート品質管理システム画面
打設進捗管理画面
打設日報の自動作成機能
当該ブロックの打設が完了し、「打設完了」ボタンをタブレット端末から入力すると、自動的に打設日報をエクセルファイルで作成します。打設当番は従来必要であった事務所に戻ってからの打設日報作成作業を短時間で終了することが可能となり、業務の効率が大幅に向上しました。
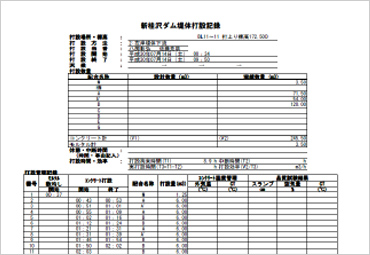
打設日報出力例
適用実績

幾春別川総合開発事業の内
新桂沢ダム堤体建設
(第1期・第2期・第3期)工事
場所:北海道三笠市
竣工年:2024年3月
発注者:国土交通省北海道開発局
規模:堤高75.5m(11.9mかさ上げ)
堤頂長397.0m
堤体積59.5万m3(かさ上げ分24.5万m3)
学会論文発表実績
- 「次世代コンクリート出荷管理システムの適用実績」,土木学会,第74回年次学術講演会,2019年
自動スライド型枠
クレーンを使用せずに型枠のスライド作業を全自動化
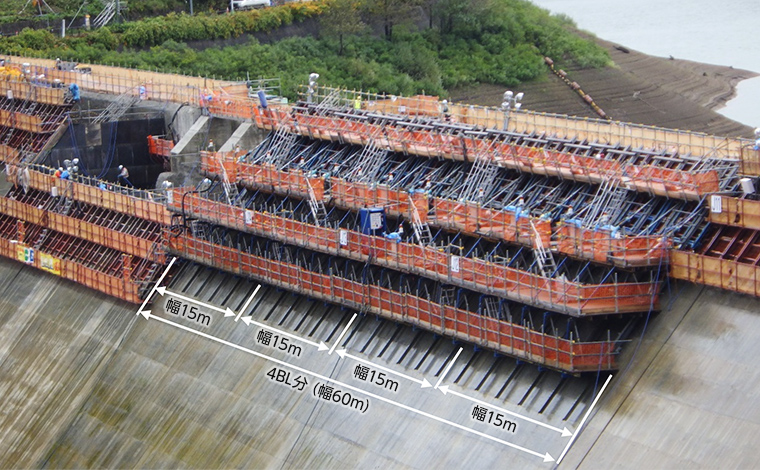
「自動スライド型枠」は、ダム等の大型構造物において、油圧ジャッキによるセルフクライミング装置と、電動モータを動力とした鋼製型枠の自動脱枠・水平移動機構を組み合わせ、一連の型枠スライド作業をクレーン作業なしで全自動化するものです。これまで、幅60m(ダム堤体4BL分(1BL:幅15m))の型枠を自動で一括スライドさせることに成功し、従来工法に比べて、作業時間を約半分に短縮することができ、作業人員も大幅に削減できました。
自動スライド型枠では、全ての電動モータ及び油圧ジャッキを同時に制御することにより、幅60mの鋼製型枠が一体となって作動し、型枠スライドに必要な一連の作業(脱枠、水平移動、スライド、セット)を全て自動で行うことができます。
特許登録済
幅60mの型枠を自動で一括スライド
関連情報
- キーワード
- 型枠、スライド、自動化、生産性向上、工程短縮
特長・メリットココがポイント
作業の省力化・平易化が可能
電動モータを用いて型枠の脱枠と水平移動を行い、油圧ジャッキによるセルフクライミング装置で鋼製型枠をスライドさせるもので、1人の作業員がタブレット端末を操作することで行えます。
また、とび工(型枠大工)、クレーンオペレータ等の特殊技能労働者でなくても作業を行うことができ、誰でも同じ精度で型枠スライド作業が可能となり、作業の省力化・平易化により、生産性が向上します。

作業の省力化・平易化が可能
作業人員の削減及び作業時間の短縮を実現
従来のクレーンによる型枠スライド作業に比べて、作業時間を約半分に短縮することができ、作業人員も大幅に削減することができます。

従来工法と自動スライド型枠の比較(幅60m当り)
並行作業が可能
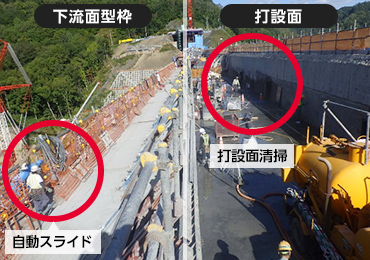
これまで打設面に配置していたクレーンが不要となるため、スライド作業と並行して、打設面清掃・打設準備等の別の作業を行うことが可能となります。
また、コンクリートなどの材料運搬をするダンプトラックとクレーン作業との錯綜が減り、運搬効率の向上による打設速度の向上が期待でき、生産性及び安全性が向上します。
並行作業が可能
高所でも安全に作業が可能
型枠作業のための足場(プラットフォーム)が躯体に常に固定されており、高所でも安全に作業することができます。
また、従来工法の3m幅でのスライド作業に比べ、60m幅を一括スライドするため、端部作業の発生頻度が劇的に減り、安全性が向上します。

高所でも安全に作業が可能
適用実績

成瀬ダム堤体打設工事(第1期・第2期)
場所:秋田県東成瀬村
工期:2018年5月~2026年12月
発注者:国土交通省東北地方整備局
規模:台形CSGダム
堤高114.5m 堤頂長755.0m 堤体積485万m3

幾春別川総合開発事業の内
新桂沢ダム堤体建設
(第1期・第2期・第3期)工事
場所:北海道三笠市
竣工年:2024年3月
発注者:国土交通省北海道開発局
規模:堤高75.5m(11.9mかさ上げ)
堤頂長397.0m
堤体積59.5万m3(かさ上げ分24.5万m3)

小石原川ダム本体建設工事
場所:福岡県朝倉市・東峰村
竣工年:2021年3月
発注者:水資源機構
規模:中央コア型ロックフィルダム
堤高139m 堤頂長558m 堤体積870万m3

大分川ダム建設(一期・二期)工事
場所:大分県大分市
竣工年:2019年11月
発注者:国土交通省九州地方整備局
規模:中央コア型ロックフィルダム
堤高91.6m 堤頂長400m 堤体積387万m3
学会論文発表実績
- 「コンクリートダム下流面への自動スライド型枠の適用実績」,土木学会,第74回年次学術講演会,Ⅵ-716,2019年
全自動トンネル覆工コンクリート打設システム
「FALCON-CAST™」
多様なニーズに対応可能な全自動打設システム
山岳トンネルの覆工コンクリートは、トンネルの長期安定性の確保などを目的に構築される、最終仕上がり面です。そのため、覆工コンクリートの不具合による剥離・剥落は、供用後の第三者災害に直結することから、確実に品質を確保しなければならない重要な構造物となります。しかし、従来、覆工コンクリートの施工は、狭隘な型枠内に技能者が窮屈な姿勢で身を乗り出しながら締固めを行う等、負担の大きい人力作業が多く、品質は技能者の技量に依存しており、未充填などの品質不良を生じる可能性がありました。
そこで、品質を確保・向上させ、締固め作業の省人化、省力化を目的として、覆工用中・高流動コンクリートと革新的な打設配管装置を開発し、覆工コンクリートの打設を完全に自動化する「全自動トンネル覆工コンクリート打設システム『FALCON-CAST※』」を開発しました。本システムを用いることで、覆工コンクリートの品質の確保・向上および生産性向上を実現しました。
※FALCON-CAST:Fully Automated pouring system for Lining-CONcrete of CAST in-situ
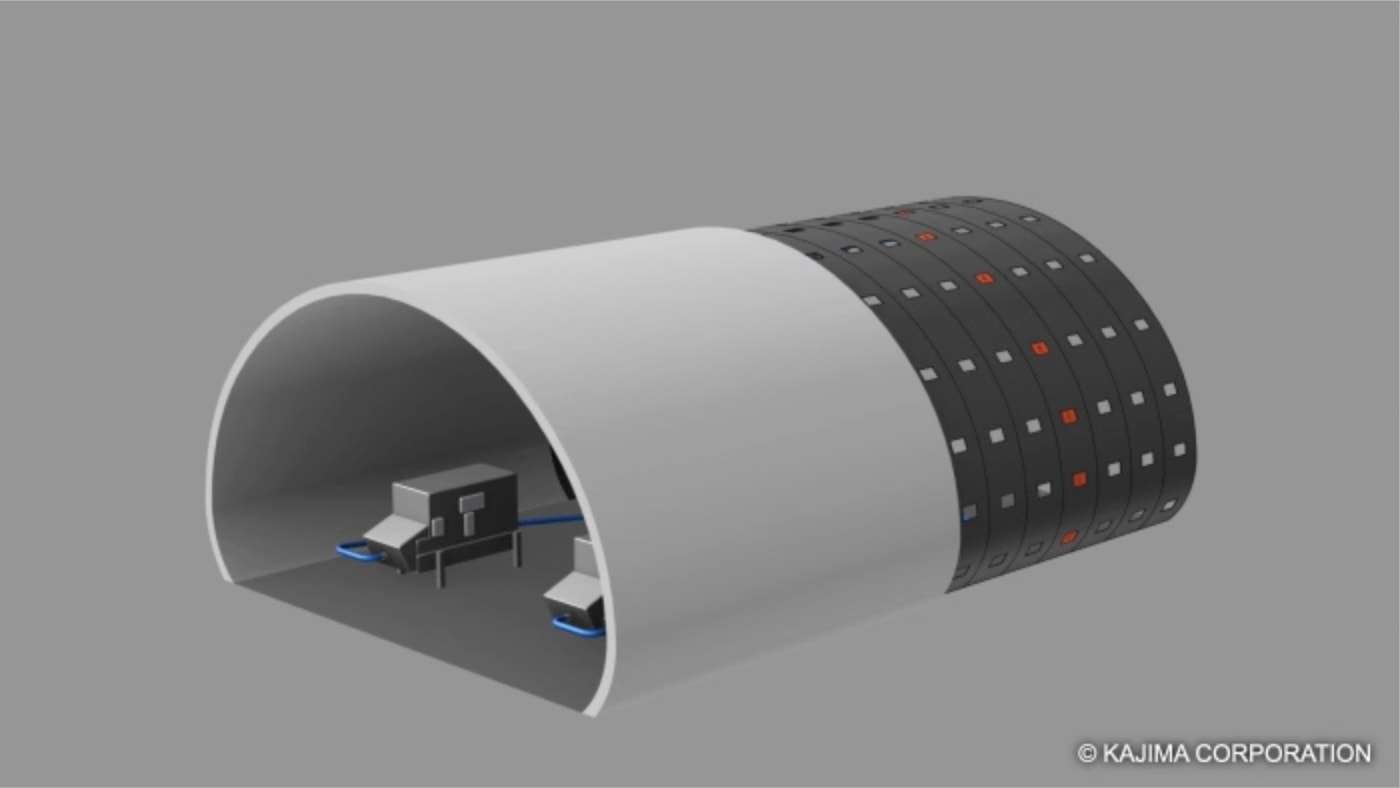
「FALCON-CAST」の施工イメージCG 革新的な打設配管装置での打設イメージ(動画:24秒/音なし)
2025年度エンジニアリング功労者賞エンジニアリング振興
令和7年度日本建設機械施工大賞 大賞部門 優秀賞
土木学会第33回トンネル工学研究発表会 優秀講演賞
土木学会 土木建設技術発表会2020 セッションⅡ山岳トンネル 最優秀賞
特許登録済
商標登録出願中
関連情報
- キーワード
- 全自動トンネル覆工コンクリート打設システム、覆工用高流動コンクリート、覆工用中流動コンクリート、
回転式打設口、高速左右切替装置、打設制御装置
全自動トンネル覆工コンクリート打設システムの構成
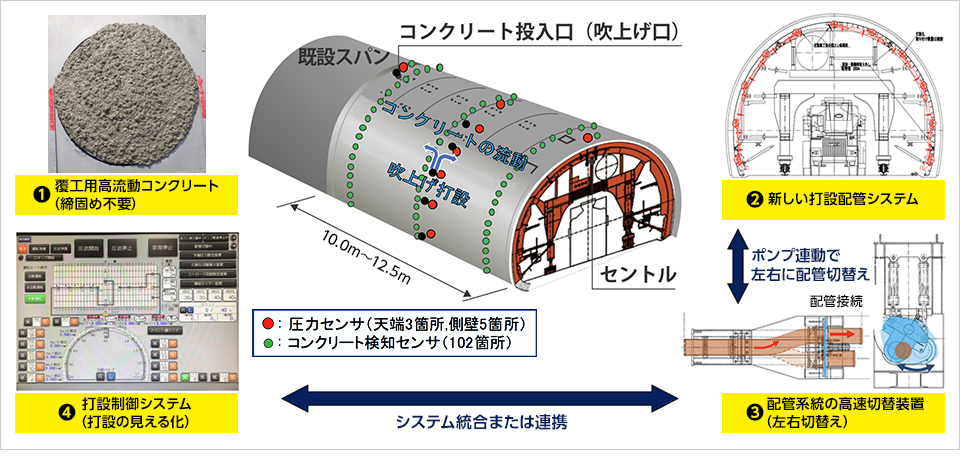
本システムは、以下の4つで構成されます。
全自動トンネル覆工コンクリート打設システム概念図

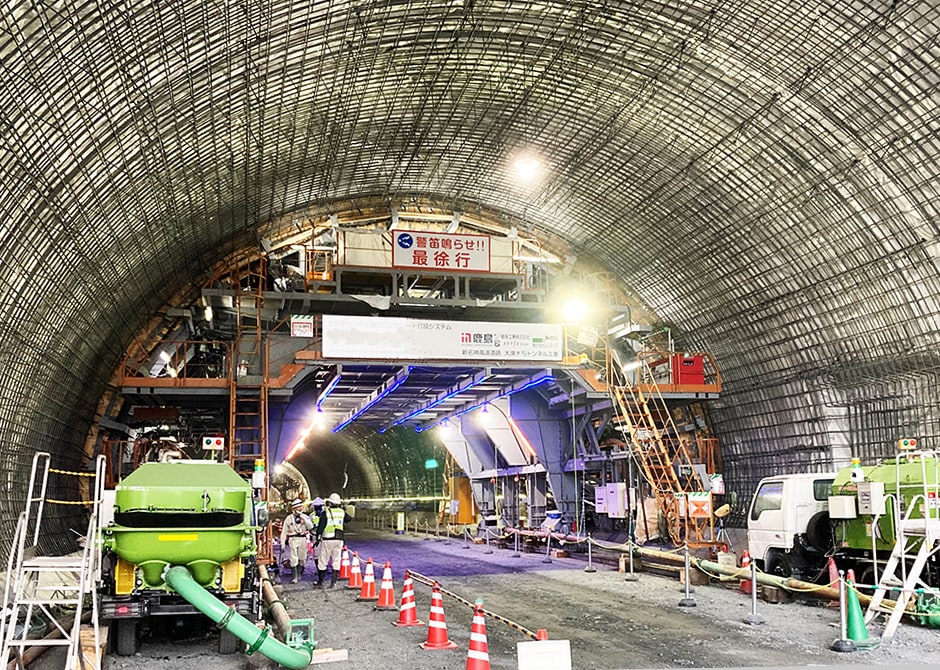
ポンプ車2台での打設状況
ポンプ車1台での打設状況
❶覆工用中・高流動コンクリートの技術
覆工用中流動コンクリートは軽微な締固めを必要とするコンクリートで、覆工用高流動コンクリートは自己充填性を有し締固めが不要なコンクリートです。それぞれ、プラント製造用、現場での流動化用として2種類の混和剤を開発し、4タイプの施工が可能です。比較的少ない単位セメント量で流動性の高いコンクリートを実現しています。
覆工用中・高流動コンクリート
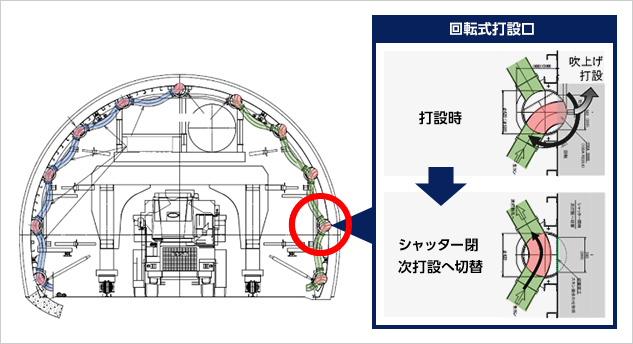
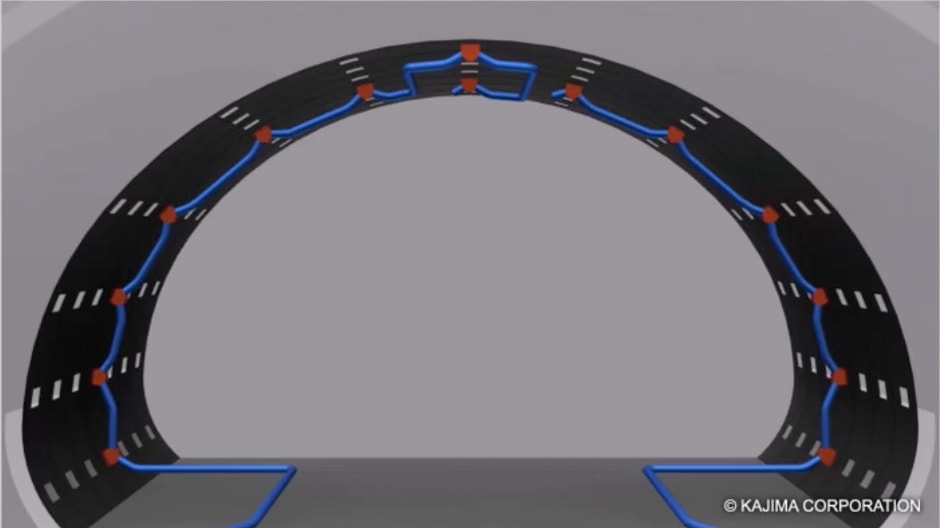
❷革新的な打設配管装置(回転式打設口)
革新的な打設配管装置は、各打設口を回転式打設口とし一筆書きで接続することで、各打設口が打設を完了した際は回転して型枠表面と同じ位置で蓋が閉まると同時に、次の打設口への配管ルートを形成します。

革新的な打設配管装置(回転式打設口)
❸打設制御装置
打設制御装置は、型枠表面にコンクリートの打上げ高さを検知するセンサを設置して打設状況を見える化するとともに、型枠バイブレータの稼働制御やコンクリートポンプとの連動制御を自動で行い、左右の高低差を無くし均等に吹上打設を行います。
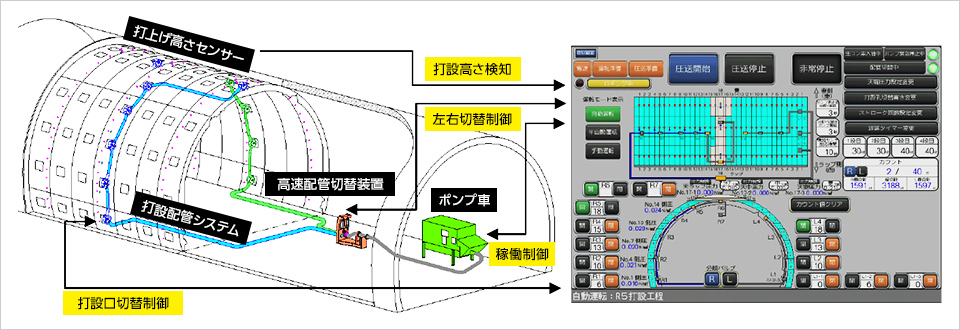
打設制御装置
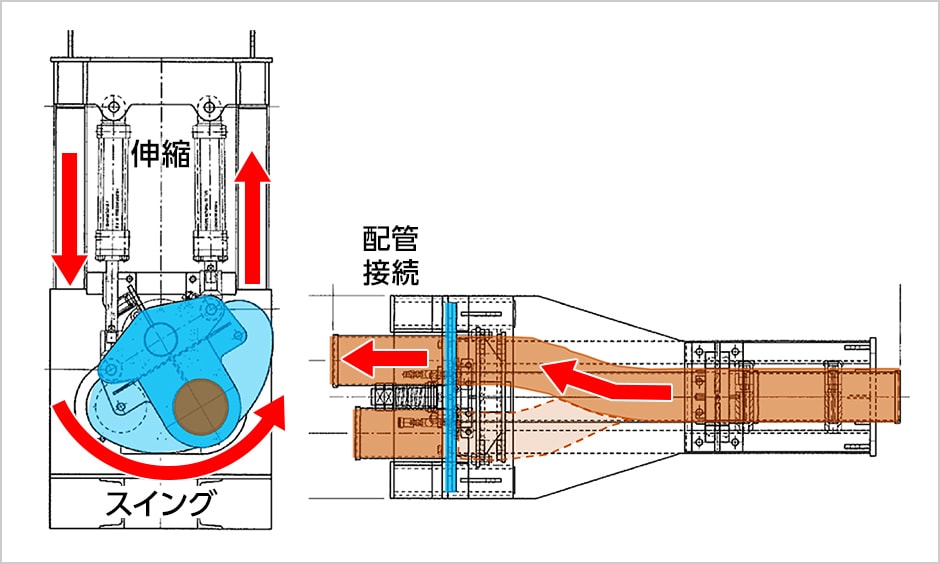
❹左右の高速配管切替装置
コンクリートポンプ1台で施工する場合、配管の分岐点に設置した高速配管切替装置により、左右系統の切替えを3秒、打設口の切替えも含めて15秒で行うことができ、流動停止時間を短時間に抑え、連続打設を実現します。
左右の高速配管切替装置
全自動トンネル覆工コンクリート打設システムの概要と特長
❶覆工用中・高流動コンクリートの技術
開発した混和剤は、分散剤と増粘剤により、覆工用中・高流動コンクリートの流動性を確保しつつ、材料分離抵抗性を付与することで、単位セメント量を少なくすることができます。また、ブリーディングを抑制し、経時保持性を含むフレッシュコンクリートの性状を良好としつつ、早期強度発現を実現しました。
- プラント製造型 増粘剤含有高性能AE減水剤
商品名 シーカビスコクリートUG6500/6550SDC(シーカ・ジャパン製) - 現場流動化型 増粘剤含有流動化剤
商品名 シーカビスコクリートUG6580/6585SDC(シーカ・ジャパン製)
覆工用中・高流動コンクリートの混和剤技術
(分離することなく高い流動性を確保)
❷革新的な打設配管装置(回転式打設口)
従来、覆工コンクリートの施工では、移動式型枠に複数の配管が設置されており、打込み箇所を切り替える際に配管内のコンクリートの回収や処分、及び清掃の作業が必要でした。
開発した革新的な打設配管装置は、各打設口を回転式打設口にし、一筆書きで接続することで、全ての打設口からコンクリートを吹き上げて圧入して打ち込みます。打設口からの打込みが完了すると打設口の配管を回転させて、次の打設口にコンクリートを連続的に供給する構造です。
革新的な打設配管装置による打設状況(動画:18秒/音なし)
この打設配管装置を可能とした回転式打設口は、打設時は吹上口が型枠表面からコンクリート内部へ突出していますが、打設を完了した際は回転して型枠表面と同じ位置で蓋が閉まると同時に、次の打設口への配管ルートを形成します。これにより、打設中の残コンクリートの回収や配管清掃が不要となります。
回転式打設口の実際の動き(動画:27秒/音あり)
❸打設制御装置(制御システム)
打設制御装置は、型枠表面に設置した複数の高さ検知センサで、コンクリートの打上がり高さ(打設進捗)を「見える化」し、回転式打設口を含む打設配管装置、型枠バイブレータ、コンクリートポンプの全ての装置を連動制御することができます。具体的には、型枠バイブレータの振動、天端圧力、打設口の切替え高さ、打設速度を設定し打設を開始すると、自動で覆工コンクリートを打設します。
また、制御システム画面は現場から工事事務所や生コン工場へ外部配信し、打設状況をリアルタイムで共有するとこにより、トラブル等への迅速な対応を図ることができます。

打設制御画面
❹左右の高速配管切替装置
従来の配管切替装置では、左右の切替えに数分要するため、コンクリートの打重ね線のような流動跡が色むらとして残るという課題がありました。そこで、コンクリートポンプの圧送信号と連動する左右の高速配管切替装置を開発しました。本装置は、電気信号による油圧制御で、約3秒間で左右の配管系統の切替えを可能とします。

左右の高速配管切替装置の稼働状況(動画:9秒/音なし)
多様なニーズに対応した実工事への適用例とその効果
本システムを、大断面となる3車線、および標準断面となる2車線の実工事に適用しました。
3車線断面
2023年、本システムを軽微な締固めが必要な覆工用中流動コンクリートにも対応できるよう進化させ、大津大石トンネル工事(滋賀県大津市)に適用しました。
また、宇治田原トンネル西工事(京都府宇治田原町)では、システムのメリットを最大限活かすことができる覆工用高流動コンクリート用いた全自動打設を成功させ、打設時の人員の約60%低減、および覆工コンクリートの品質確保および向上を実現しました。

大津大石トンネル(3車線断面)での中流動コンクリート自動打設の様子

宇治田原トンネル西(3車線断面)での高流動コンクリート自動打設の様子
2車線断面
さらに、2024年、養老トンネル南工事(三重県いなべ市)では、現場で流動化させる覆工用高流動コンクリート用いて、標準的な2車線断面用に各種装置を小型化した全自動打設を完成させ、打設時の人員を約50%の低減を実現しました。

養老トンネル南(2車線断面)でのポンプ1台での自動打設の様子

養老トンネル南の仕上がり状況(現場流動化型覆工用高流動コンクリート)
その他にも、現場で流動化させる覆工用中流動コンクリートを用いた全自動打設も可能であり、あらゆる断面、中流動コンクリートまたは高流動コンクリート、さらにそれぞれのプラント製造型、現場流動化型が選択可能となり、多様なニーズに対応することができます。
適用実績

養老トンネル南
場所:三重県いなべ市
工期:2022年8月〜2026年10月
発注者:中日本高速道路
規模:トンネル延長(本坑)2,062m
掘削断面積90.3m2

宇治田原トンネル西
場所:京都府宇治田原町
工期:2019年5月~2026年1月(その1)
2022年9月~2027年10月(その2)
発注者:西日本高速道路
規模:トンネル延長上り線822m 下り線1,092m
設計掘削断面積140m2 内空断面積116m2

大津大石トンネル
場所:滋賀県大津市
工期:2019年5月~2025年3月
発注者:西日本高速道路
規模:トンネル延長上り線695m 下り線917m
設計掘削断面積127.3m2 内空断面積103.8m2
学会論文発表実績
- 「トンネル覆工コンクリートの全自動打設システムの開発」,日本建設機械施工協会,建設施工と建設機械シンポジウム論文集・梗概集,2024年
- 「トンネル覆工コンクリート全自動打設システムの施工実績」,土木学会,トンネル工学報告集,第33巻,Ⅰ-12,2023年11月
- 「中流動覆工コンクリートを用いた自動打設システムの適用実績」,土木学会,第78回年次学術講演会,2023年
- 「覆工用高流動コンクリートを用いた自動打設システムの適用実績」,土木学会,第78回年次学術講演会,2023年
- 「トンネル覆工コンクリートの自動打設システムの開発」,土木建設技術発表会2020,Ⅱ-11,土木学会,2020年
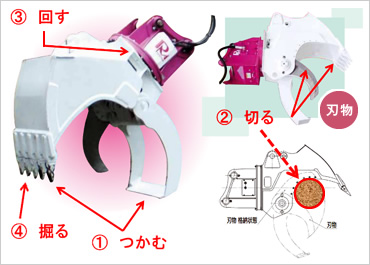
ロックボルト工の完全機械化
モルタル注入作業、ロックボルト挿入作業を完全機械化
鹿島は、山岳トンネル工事におけるロックボルト工の穿孔からモルタル注入、ロックボルト挿入までの一連作業を完全機械化する「ロックボルト打設専用機」を、フランスの建機メーカー・ロボドリル社と共同で開発し、日下川新規放水路工事(高知県日高村)に適用しました。
本専用機により、作業員の肉体的負担の大きいロックボルト挿入作業が減り、切羽近傍での作業がゼロになります。また、ガイダンスシステムを搭載しているため、従来人力で行っていた座標測量が不要となり、人員の削減、測量時間の短縮につながります。安全性、生産性、品質の向上が期待できます。

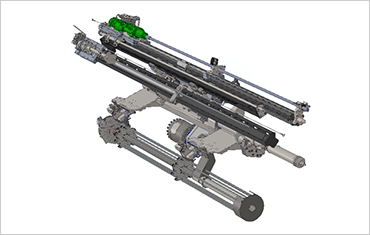
一連作業を完全に機械化したロックボルト打設専用機
- キーワード
- ロックボルト、機械化、省人化、生産性向上
ロックボルト打設専用機の特徴と効果の実証
本専用機は、汎用のホイールローダをベースに、前方のロックボルト工打設専用機ブーム1本と、装薬作業などを行うバスケットを実装した作業用ブーム2本、後方に油圧パックを搭載し、さらに穿孔位置と打設角度を示す相対座標によるガイダンスシステムを装備しています。これにより、センターブーム1本で穿孔からモルタル注入、ロックボルト挿入までの一連の作業を完全に機械化します。その結果、苦渋作業であった高所でのロックボルトの装填作業が減り、切羽近傍での作業はゼロとなり作業員の安全が確保されます。また、ガイダンスシステムを用いることで、測量作業の人員減・時間短縮にもつながります。
日下川新規放水路工事に適用した結果、オペレータ1名によるロックボルト工の一連作業が可能であることを確認しました。また、ロックボルトを持ち上げ、孔に手で押し込む苦渋作業が無くなったことで作業環境が飛躍的に改善したとともに、ロックボルト1本当たりの打設効率が従来の1.3倍に向上しました。

施工状況
特長・メリットココがポイント
センターブーム1本で一連作業を完結
ロックボルト工打設専用ブームには、穿孔用ガイドセル、モルタル注入用ガイドセル、ロックボルト挿入用ガイドセルを搭載し、それぞれのガイドセルが同心円上で動作します。
一度機械をセットすればブームを動かすことなく、穿孔からロックボルト挿入までの一連作業が可能で、ロックボルトホルダーは1回の補給で最大9本(ガイドセル:1本、チェンジャー:8本)搭載できます。
ロックボルト工打設専用ブームの仕様
相対座標によるガイダンスシステム
既に打設したロックボルト頭部の位置を、ロックボルト工打設専用ブームの穿孔用ガイドセルで3点ピックアップすることにより、次に打設するロックボルトの穿孔位置と打設角度を、キャビン内の画面でオペレータにガイダンスするシステムを開発し、装備しています。このため、専用機本体の絶対座標をトータルステーションなどの機器を用いて測量する作業がなくなり、キャビン内にいる1名のオペレータによるブーム操作のみで、相対的な穿孔位置と打設角度を短時間に確定することが可能となりました。
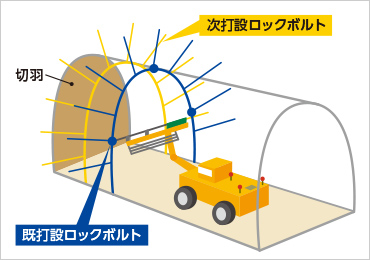
ガイダンスシステムの構成
適用実績

平成29-31年度 日下川新規放水路工事
場所:高知県高岡郡日高村
竣工年:2021年3月
発注者:国土交通省四国地方整備局
規模:トンネル延長L=2,850m 内空断面積55m2
ブルドーザ3D施工支援システム
全地球衛星測位システム(GNSS)を利用したブルドーザ施工支援システム
本システムは、RTK-GNSS測位法を利用したブルドーザの施工補助システム(MG)と施工自動制御システム(MC)です。GNSSから得られるブルドーザの3D位置データと3D設計データから現地盤と設計地盤との差をリアルタイムに算出し、キャビン内のモニタに設計地盤との差を表示するMG(Machine Guidance)システムと排土板を設計地盤の高さと勾配に合わせて自動制御するMC(Machine Control)システムがあります。いずれのシステムでも作業の大幅な効率化や品質の向上・均一化が図れます。
RTK-GNSS:測りたい移動局(未知点)の他に位置が分かっている固定局(既知点)を必要とする相対測位方式で、位置情報と誤差情報をリアルタイムに算定し移動局の測位を行う。
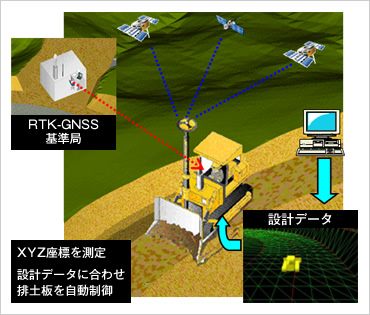
システムイメージ図
- キーワード
- GNSS測量、RTK-GNSS、ブルドーザ、施工支援、施工の効率化、品質向上
本システムの特長と主要構成機器
- 撒出し時の丁張り及びトンボなどの測量作業は不要です。
- 重機位置がリアルタイムに表示されるので、施工エリアへの誘導が容易に行えます。
- 作業速度の効率化と仕上がり精度の向上が図れます。
- 斜面、曲線部などの複雑な施工にも対応可能です。
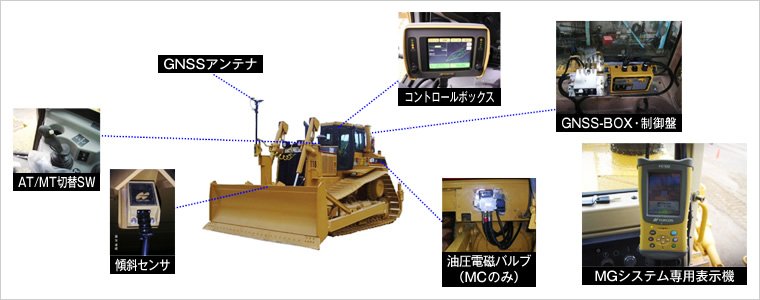
システム主要機器
特長・メリットココがポイント
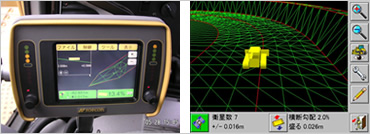
MGシステム(Machine Guidance)
縦断、横断、勾配、曲線などを含めた設計地盤と現在の排土板位置との差をモニタにリアルタイムに表示できます。

MGシステム専用表示機
MCシステム(Machine Control)
設計地盤や設定した高さに合わせて、排土板位置を自動制御することができます。
MCシステム コントロールボックス/表示画面
適用実績

京極発電所
場所:北海道虻田郡
発注者:北海道電力
規模:堤体積125.1万m3

胆沢ダム
場所:岩手県奥州市
発注者:国土交通省東北地方整備局
規模:堤体積1,350万m3

湯西川ダム
場所:栃木県日光市
竣工年:2012年9月
発注者:国土交通省関東地方整備局
規模:堤体積103.2万m3

殿ダム
場所:鳥取県鳥取市
竣工年:2012年1月
発注者:国土交通省中国地方整備局
規模:堤体積211万m3

徳之島ダム
場所:鹿児島県大島郡
竣工年:2012年1月
発注者:九州農政局
規模:堤体積88.9万m3
バックホウ3D施工支援システム
全地球衛星測位システム(GNSS)を利用したバックホウ施工支援システム
本システムは、RTK-GNSS測位法を利用したバックホウの施工支援システムです。
GNSSから得られるバックホウの3D位置データとブーム、アーム、バケットに取付けた角度センサのデータからバケット刃先位置をリアルタイムに算出し、設計データと共に刃先位置をキャビン内のモニタに表示します。オペレータはモニタの画面より設計データとバケット刃先の現在位置の差を常時確認できるので、丁張がなくても法面の施工を容易に行えます。
RTK-GNSS:測りたい移動局(未知点)の他に位置が分かっている固定局(既知点)を必要とする相対測位方式で、位置情報と誤差情報をリアルタイムに算定し移動局の測位を行う。
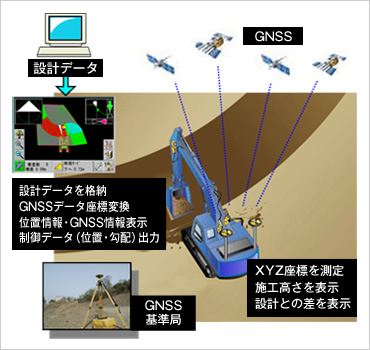
システムイメージ図
- キーワード
- GNSS測量、RTK-GNSS、バックホウ、施工支援、施工の効率化、品質向上
本システムの特長と主要構成機器
- 設計データとバケット刃先の現在位置を常時確認できるので、丁張がなくても法面の施工を容易に行えます。
- 重機位置がリアルタイムに表示されるので、施工エリアへの誘導が容易に行えます。
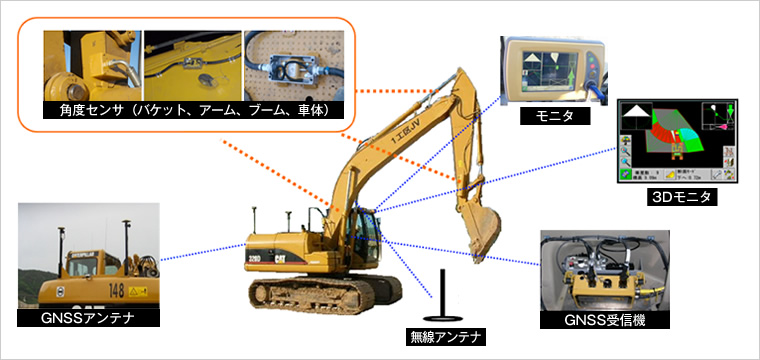
システム主要構成機器
特長・メリットココがポイント
3Dによる高度な施工支援機能
- 走行・出来高記録機能:当該重機の走行履歴や施工エリアでの出来高の記録
- 面合せ設定:掘削する面とバケット軸の合せ設定
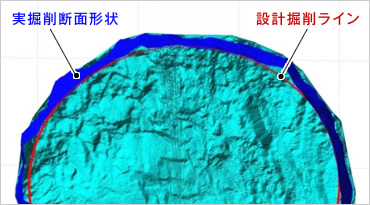
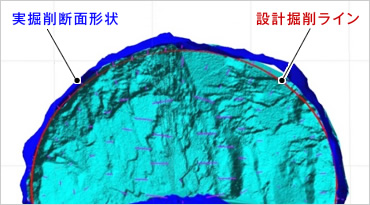
- 掘削断面表示:掘削する面の画面上での断面表示
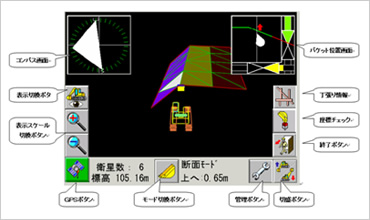
3D仕様の表示画面
2D仕様でも可能な施工支援機能
- 勾配設定:指定した勾配での掘削作業
- 深さ設定:指定した深さの掘削作業
- 距離測定:斜距離や水平距離のバケット移動距離測定

2D仕様の表示画面
適用実績

胆沢ダム
場所:岩手県奥州市
発注者:国土交通省東北地方整備局
規模:堤体積1,350万m3

京極発電所
場所:北海道虻田郡
発注者:北海道電力
規模:堤体積125.1万m3

当別ダム
場所:北海道石狩郡
竣工年:2012年12月
発注者:北海道空知総合振興局
規模:堤体積81.3万m3
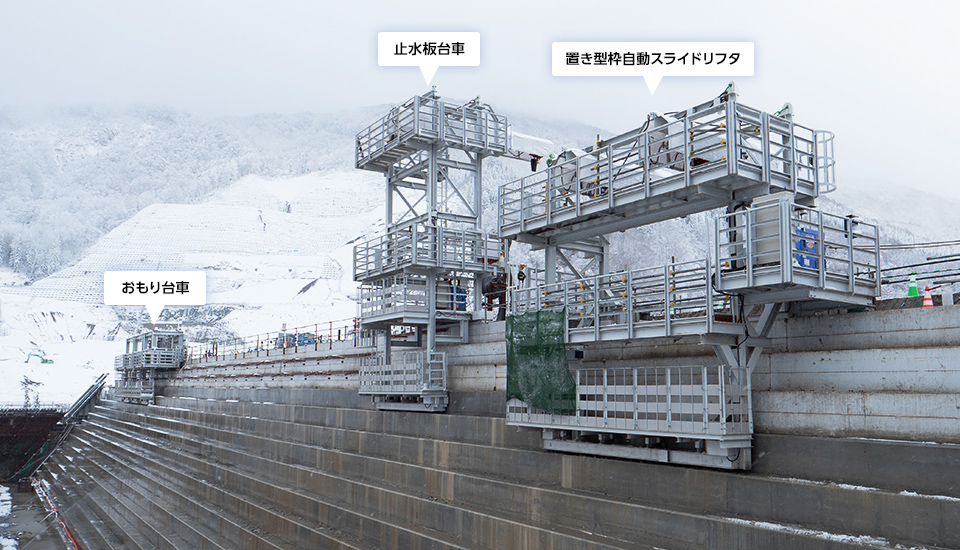
置き型枠自動スライドシステム
台形CSGダムにおける保護コンクリート構築の合理化
施工の合理化が求められる台形CSGダムの施工においては、汎用重機により大量高速施工する内部のCSG打設に対し、外部の上下流面保護コンクリート構築が高速化のネックとなっていました。このため成瀬ダムでは上下流面の保護コンクリートを置き型枠による階段形状とする設計が採用されました。
本システムは、上下流面の階段形状を横移動可能なリフターを用いて、置き型枠を下段から打設面へ自動で引き上げて設置する「置き型枠自動スライドリフタ」及び、同機構を用いて保護コンクリート打設時に型枠の滑動・転倒を防ぐ「おもり台車」、止水板を引き上げる「止水板台車」から構成されています。
本システムにより、堤体打設面上にクレーンを設置することなく、CSGダムの高速施工を実現するとともに、自動化により安全性も向上します。
令和3年度ダム工学会 技術開発賞
令和3年度建設施工と建設機械シンポジウム 優秀論文賞
令和4年度日本建設機械施工大賞 最優秀賞
特許登録済
置き型枠自動スライドシステム
関連情報
- キーワード
- 台形CSGダム、保護コンクリート、置き型枠、高速化、自動化、省力化
本システムの概要
置き型枠をガイドレールとして使用
本システムは置き型枠として用いるH形鋼をガイドレールとして階段状の上下流面を横移動する機構を備えた台車を基本構造としています。台車は下段車輪を保護コンクリート水平面に載せ、上段車輪はH型鋼のフランジをガイドレールとし走行します。直線だけでなく曲線形状にも追従して走行が可能です。
置き型枠スライド作業を自動化
「置き型枠自動スライドリフタ」はCSGのリフト高さ0.75mに合わせてH形鋼(H400)を2段重ねた置き型枠(H=0.8m、L=5m)を、既打設の最下段から吊り上げて設置するものです。設置完了後、次の箇所に5m横移動し同様の作業を行います。これら一連の作業をリモコンからの指示により自動的に行うことができます。
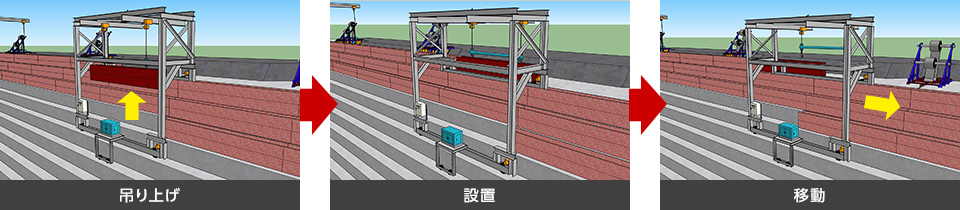
置き型枠自動スライド手順
特長・メリットココがポイント
堤体打設面上のクレーンが不要
- 本システムを採用することにより、堤体打設面上に置き型枠揚重用のクレーンを配置することなく脱型~設置までの一連の作業を実施することができ、CSG打設作業との干渉を無くすことが可能となります。
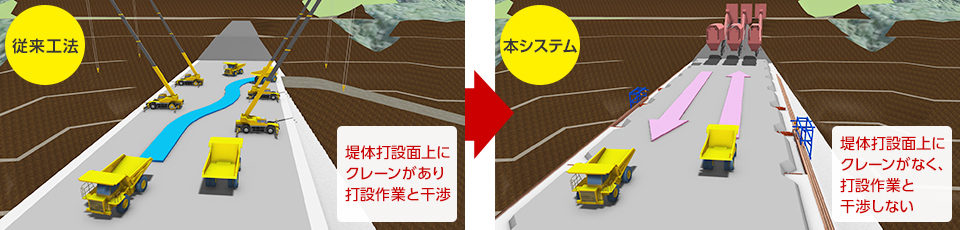
堤体打設面上の作業状況比較
自動化による高速化・省人化及び安全性向上
- 置き型枠の脱型~設置、横移動までの一連の作業を自動で行うことで、クレーンを使用した従来工法では1ブロック(15m)当たり150分かかっていた作業を30分に縮減できます。
- リモコンから作業指示を本システムに与えるだけで一連の作業を行うことが可能となり、クレーンのオペレータを含め5名で行っていた作業を1名にまで削減できます。
- 作業員が最下段の置き型枠で行っていた玉掛け作業を、自動玉掛け機能により自動で行えるため、作業員が堤体外に出て行う高所作業が無くなります。
適用実績

成瀬ダム堤体打設工事(第1期・第2期)
場所:秋田県東成瀬村
工期:2018年5月~2026年12月
発注者:国土交通省東北地方整備局
規模:台形CSGダム 堤体積485万m3
学会論文発表実績
- 「台形CSGダムにおける保護コンクリート構築の合理化システム」,土木学会,第77回年次学術講演会,2022年
プレキャストブロック自動据付システム
汎用建設機械にカメラ、人工筋肉ロボット等を搭載してブロックを自動据付
2011年の大雨による土砂災害復旧工事である赤谷3号砂防堰堤工事は、崩落斜面直下での作業となるため、6月~10月の出水期には人が立ち入れず、無人化施工が前提条件になります。従来の無人化施工はカメラモニタを見ながらの遠隔操作になるため、カメラの死角などによる作業効率の低下やオペレータの疲労による誤操作のリスクがありました。
そこで、自動化、ロボット化の効果が高い繰り返し作業であるプレキャストブロックの据付を自動化しました。汎用重機にカメラや人工筋肉ロボットを搭載し、ブロックの位置測量にはARマーカによるAR測量を適用しました。
本システムにより、遠隔操作による無人化施工と比較して20%以上の生産性向上を図り、オペレータの疲労を大幅に低減しました。また、GNSS受信圏外でも自動化施工を実施することができます。
特許登録済
令和3年度土木学会 技術賞(Ⅰグループ)
2022年度エンジニアリング功労者賞
令和4年度建設施工と建設機械シンポジウム 優秀論文賞
令和4年度地盤工学会 技術業績賞
令和5年度日本建設機械施工大賞 最優秀賞

プレキャストブロック自動据付(全景、操作室内)(動画:59秒/音なし/2倍速)
関連情報
- キーワード
- 災害復旧、無人化施工、遠隔操作、プレキャストブロック、コンクリートブロック、自動化、汎用重機、カメラ、ARマーカ、
AR測量、人工筋肉ロボット、省人化、負担低減、生産性向上、高精度
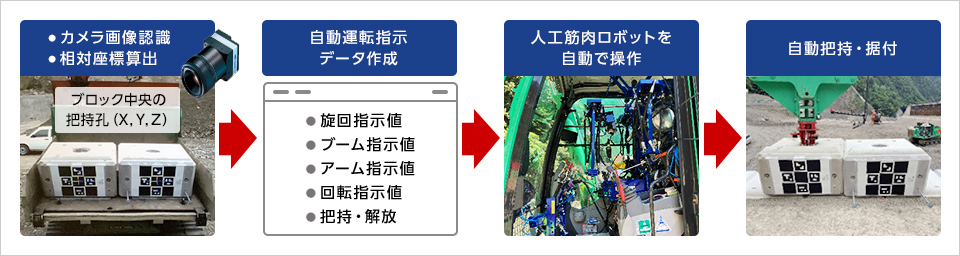
システムの概要
本システムは高価な自動化専用の建設機械ではなく、汎用バックホウに各種センサ等を装備することにより、精度よく重機姿勢を算出します。
キャビン上部に搭載したカメラを用いてプレキャストブロックに貼り付けたARマーカを画像認識し、AR測量によって動作の目標座標とブロック面の角度を瞬時に算出します。これらの情報を元に独自開発した自動運転システムにより、ブロック面の角度を含めた自動運転指示データを作成します。この自動運転指示データに従って汎用バックホウの運転席に設置した人工筋肉ロボットを自動制御します。
これらの技術によって誤差10mm以下の高い精度で、プレキャストブロック据付の自動化を実現しました。
自動運転フロー

位置計測方法と人工筋肉ロボット
特長・メリットココがポイント
無人化施工に比べ20%以上の生産性向上
遠隔操作による無人化施工では、把持操作や据付の微調整、再設置など多くの時間を要していましたが、自動運転により、微調整や再設置操作が不要となり20%以上の生産性を向上させることができます。
有人施工ではブロック揚重のクレーンオペレータや玉掛者、測量など、5名程度の作業員が必要なのに対して、自動化施工ではオペレータ1名で実施できます。
また、オペレータ1名で複数台の重機を自動運転操作させることにより、更なる生産性向上と省人化が期待できます。

プレキャストブロック据付 自動化施工状況
オペレータの疲労による誤操作リスク低減
無人化施工では複数のカメラモニタを凝視しながら、長時間にわたって遠隔操作するため、オペレータの疲労を助長し、誤操作のリスクがあります。自動運転によって、オペレータの作業はモニタを見ながらの監視と異常時の対処のみとなり、誤操作リスクを大きく低減できます。

自動運転監視状況(操作室)
汎用重機に自動化設備を装備して自動運転が可能
本システムは汎用の重機(今回:バックホウ)にカメラや人工筋肉ロボット、計測機器等を後付けして自動運転を実施することが可能です。
システム開発などの準備期間が短くて済み、災害復旧などの急を要する現場での無人化施工や自動運転に迅速に対応することができます。

汎用バックホウに設置する自動運転用設備
適用実績

赤谷3号砂防堰堤工事
場所:奈良県五條市
竣工年:2023年3月
発注者:国土交通省近畿地方整備局
規模:プレキャストブロック×824個
学会論文発表実績
- 「大型プレキャストブロック据付の自動化施工」,建設施工と建設機械シンポジウム,2022年
- 「赤谷3号砂防堰堤工事におけるブレキャストブロック据付の自動化施工」,基礎工,2022年1月号
- 「大型プレキャストブロック据付の自動化施工」,建設機械施工,2022年4月号
- 「大型プレキャストブロック自動据付システムの開発」,土木学会,第76回年次学術講演会,2022年
最適自動発破設計システム
岩盤データと理論に基づく評価式に従い、最適な発破を実現
山岳トンネルにおける発破は、近年コンピュータジャンボ導入が進むものの、暗黙知に頼らず岩盤性状に応じた合理的な発破ができているとは言い難い状況でした。そこで、担当者の発破経験によらず地山データに基づき適切な発破を自動で実践するシステムを開発しました。
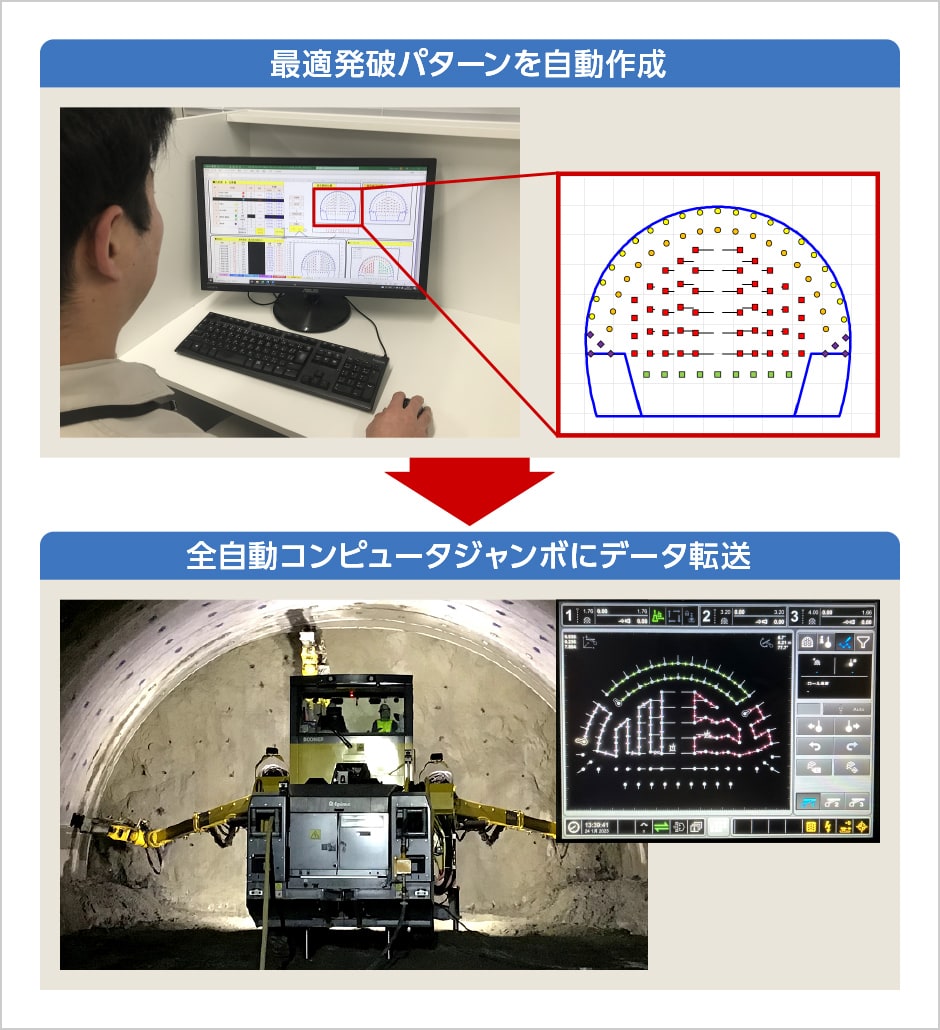
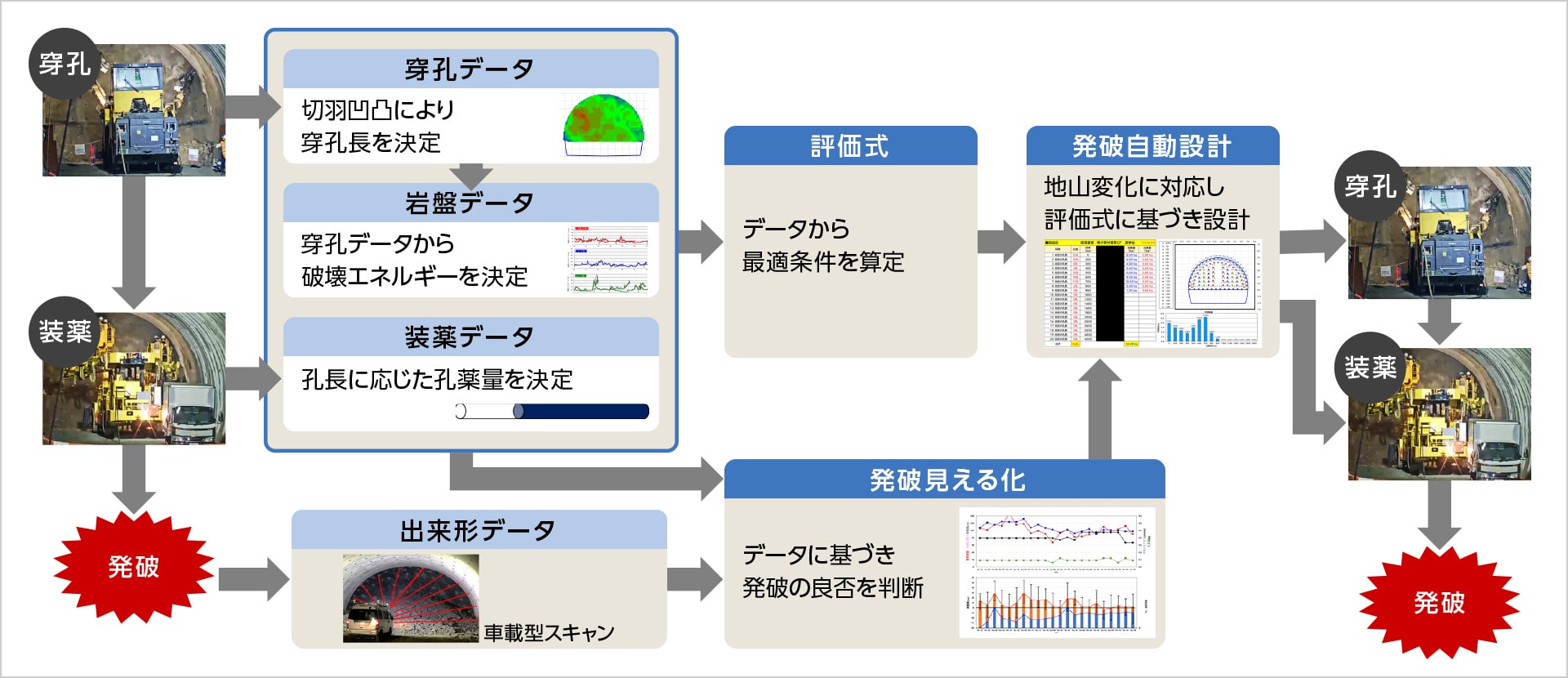
本システムでは岩盤性状に対し、適切な爆薬量と穿孔配置を決定する評価式を構築しており、これを核として穿孔時の岩盤データから、最適な穿孔数・配置・装薬量を自動生成し、最適発破を実践します。
さらに発破後の出来形スキャン等、発破結果の一元化システムも構築しており、地山変化や発破良否の傾向を把握し、以降の発破へのフィードバックが可能です。
特許登録済
最適自動発破設計の実践
- キーワード
- 山岳トンネル、発破、コンピュータジャンボ、発破設計、最適化
最適自動発破設計システムの構成
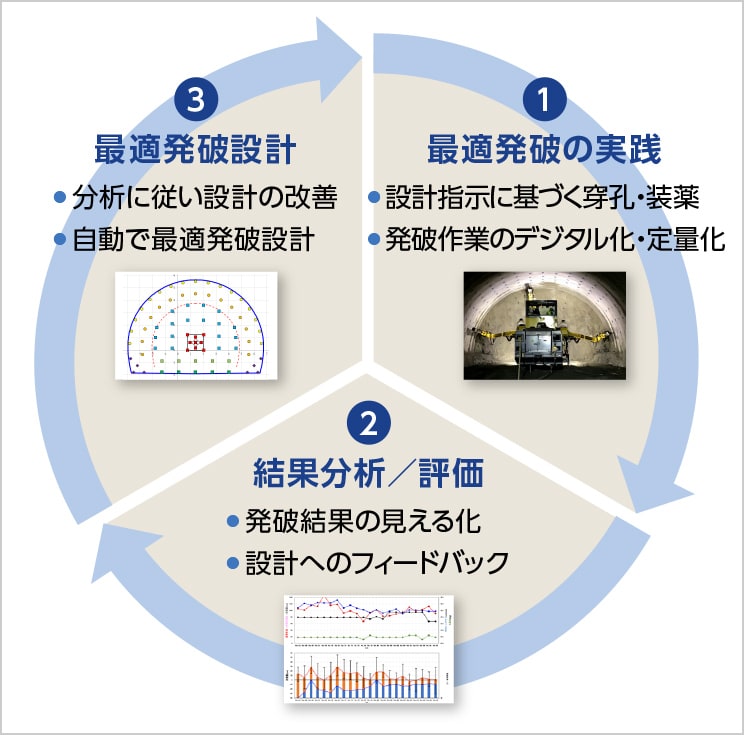
最適発破は①発破データ(穿孔情報や出来形)を定量化し、②そのデータを一元化して見える化し、評価・分析を行ったのち、③その分析結果に基づき最適自動発破設計システムで穿孔・装薬の設計改善を図るというサイクルを回します。
①最適発破の実践
発破指示書を受信したコンピュータジャンボが、指示書通りに自動で穿孔し、各孔に装薬します。発破後には、掘削断面を3Dスキャナで測定し、余掘量が算出されます。
②結果分析/評価
直前の発破で得られた岩盤性状と余掘量データに、蓄積された施工データを加えて分析・評価し、次の発破計画にフィードバックします。
③最適発破設計
岩盤性状データを本システムに入力することで、最適な穿孔数と配置、装填する火薬量などが自動生成され、発破指示書が完成します。この指示書がコンピュータジャンボに送信されます。
最適発破のサイクル
最適発破設計の現場運用フロー
特長・メリットココがポイント
限界半径の理論解に基づく
穿孔/装薬設計
岩盤データに基づく合理的な発破設計のため、理論解に基づく評価式を確立しています。
発破設計の因子として岩盤条件・穿孔条件・装薬条件の3条件がありますが、評価式では、これらの因子より、発破孔1孔の起爆が周辺岩盤に及ぼす破壊影響領域(限界半径)を求め、これにより最適な孔間隔を決定します。
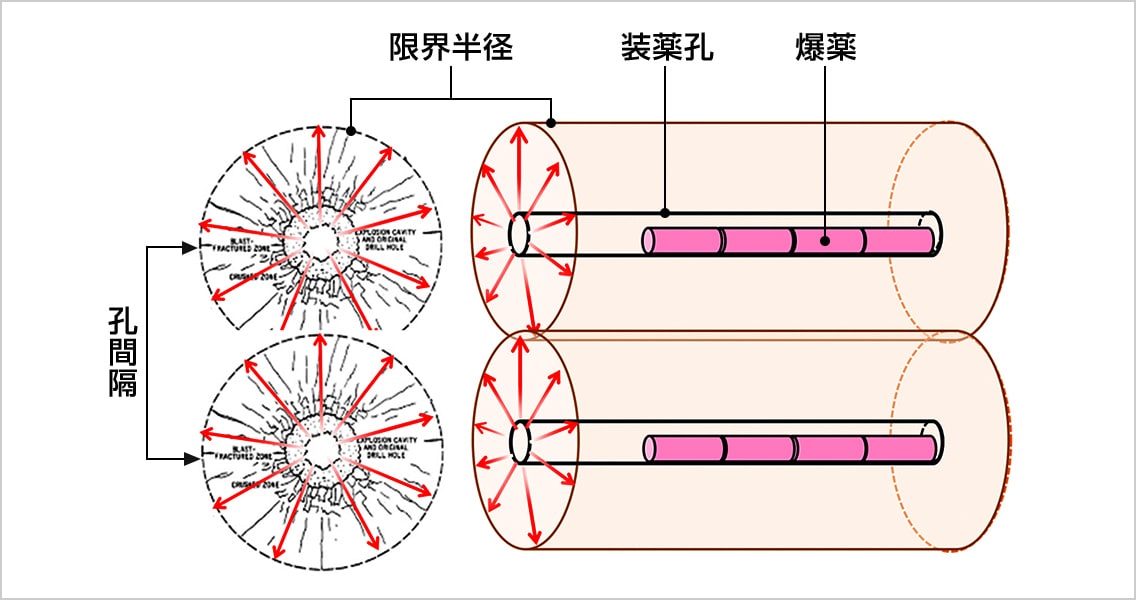
破壊影響領域(限界半径)の概念
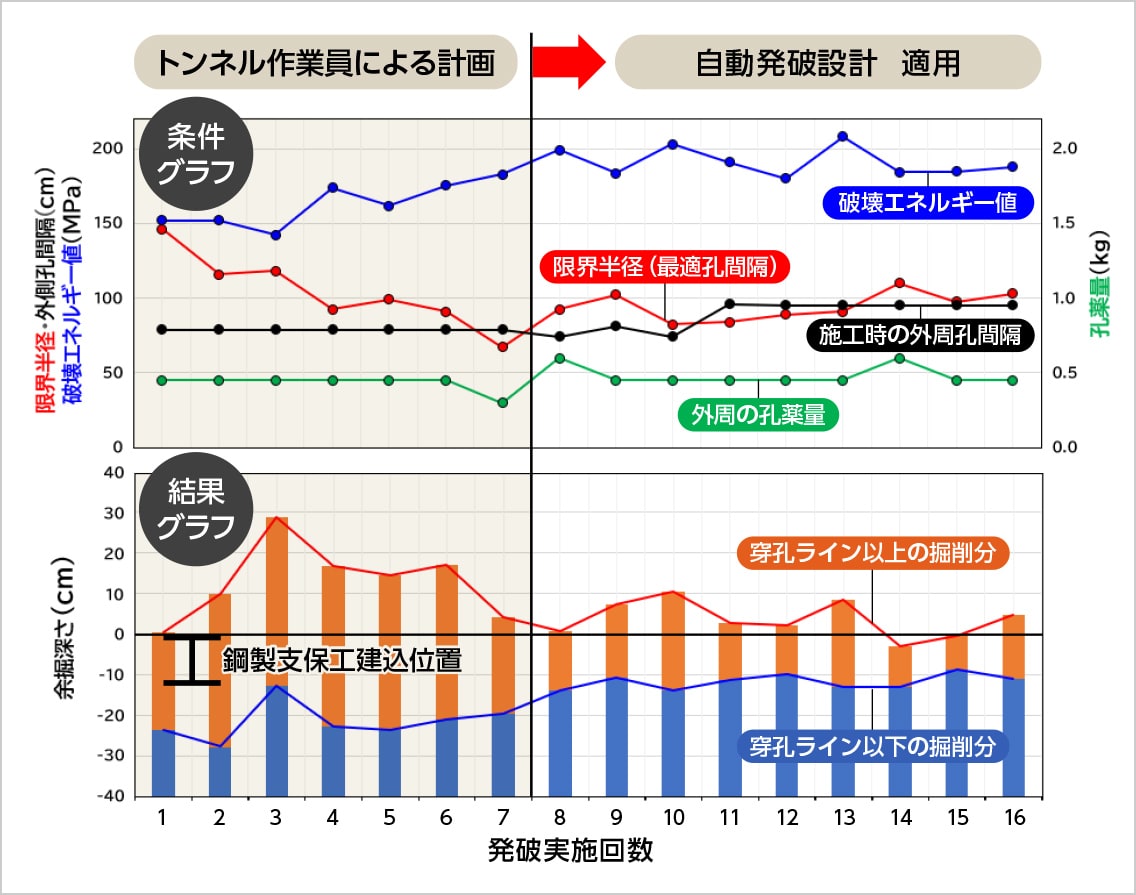
発破見える化システム
発破見える化システムは、発破結果が想定通りに得られているか確認するため、発破条件と結果を一元化し、発破良否の傾向を把握することができます。
これにより元々ばらつきの多い発破結果を統計的に評価でき、要因分析も容易になり、次発破以降の有効な対策を講じることができます。
発破見える化システム
最適自動発破設計システム
導入による効果
最適自動発破設計システムを導入したことにより、岩盤性状の変化に応じて穿孔数・装薬量を適正化することができました。システム導入前に比べ、穿孔時間を25%、装薬時間を15%削減でき、発破全体にかかるサイクルタイムを20%削減した実績を得ています。また、余堀量も60%低減したことを確認しています。
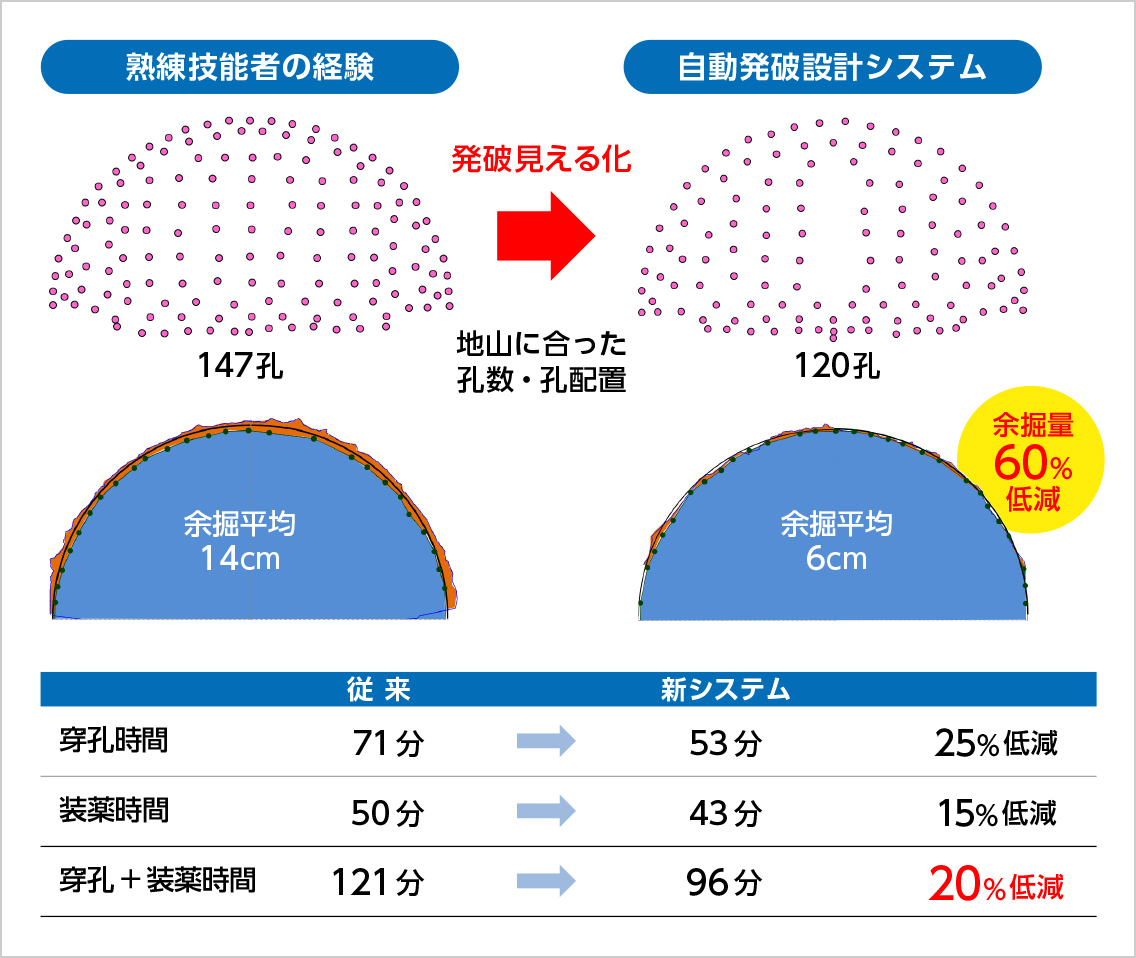
最適自動発破設計システム導入による効果
適用実績

能越道 鷹ノ巣山2号トンネル
場所:石川県輪島市
竣工年:2022年3月
発注者:国土交通省北陸地方整備局
規模:トンネル掘削延長951m
掘削断面積140m2(最大)

神岡試験坑道
場所:岐阜県飛騨市
発注者:鹿島
規模:トンネル掘削321.3m
掘削断面積 アプローチ部43.9m2
自動化施工試験部73.5m2
学会論文発表実績
- “Development of Advanced Tunnel Blasting and Shotcrete as Automated Tunnel Construction System”,WTC (World Tunnel Congress) 2024 Proceedings,2024年4月
- 「最適自動発破設計システム」,建設機械施工,Vol.76,No.3,2024年3月
- 「山岳トンネルにおけるデジタル技術の活用(10)─地山データと理論解による最適発破設計システム─」,トンネルと地下,2024年1月号
- 「自動化とデータ分析に基づく生産性の高いトンネル発破掘削の実践」,土木学会,第76回年次学術講演会,2021年
2ブームロックボルト自動施工機
穿孔からロックボルト挿入までをボタン1つで自動施工
鹿島は、古河ロックドリルと共同で、山岳トンネル工事におけるロックボルト工のうち、穿孔(せんこう)位置への誘導から穿孔、モルタル注入、ボルト挿入までの一連作業を自動化する「2ブームロックボルト自動施工機」を開発し、次世代の山岳トンネル自動化施工システム「A4CSEL for Tunnel」の実証実験を行っている神岡試験坑道(岐阜県飛騨市)に導入しました。
本機により、施工速度および精度を確保したうえで、作業員の苦渋作業の軽減と、安全性の飛躍的向上を実現しました。
2025年度エンジニアリング奨励特別賞
特許出願中

ロックボルト工の一連作業を自動化する「2ブームロックボルト自動施工機」
関連情報
- キーワード
- ロックボルト、機械化、自動化、省人化、安全性向上
ロックボルト工の一連作業を自動化!!
本機は、古河ロックドリル社製の従来の2ブームロックボルト施工機に、センサやプログラム、インターフェース(情報や信号のやり取りによる制御)を追加して改良を行い、さらに「穿孔位置の自動位置合わせシステム」と「自動ロックボルト打設装置」を新規搭載したものです。これにより、これまで手動で切り替え操作を行っていた、①穿孔位置への誘導、②穿孔、③モルタル注入、④ボルト挿入までの一連作業をボタン1つで自動施工することができます。

2ブームでロックボルトを自動で連続的に施工

自動化された一連作業をキャビン内から監視
2ブームロックボルト自動施工機の概要
穿孔位置の自動位置合わせシステム
「穿孔位置の自動位置合わせシステム」では、あらかじめ登録した設計穿孔位置データと、トータルステーションで計測した本機位置データから、「自動ロックボルト打設装置」の穿孔位置への誘導および打設角度の設定を自動で行います。これにより、作業員による穿孔位置のスプレーマーキング作業、オペレータによるブーム操作といった従来の作業が不要となり、省力化、さらには施工精度の確保および安全性の向上を実現しました。
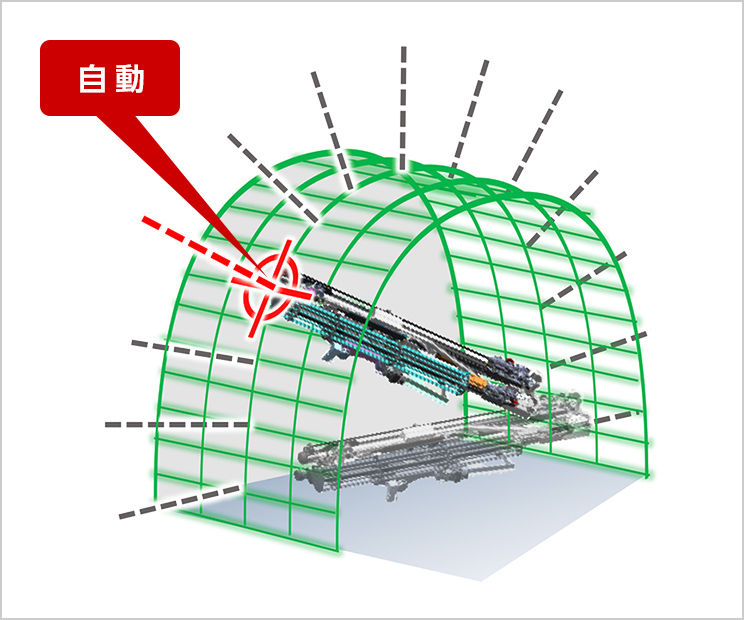
穿孔位置まで誘導、打設角度設定を自動で実施
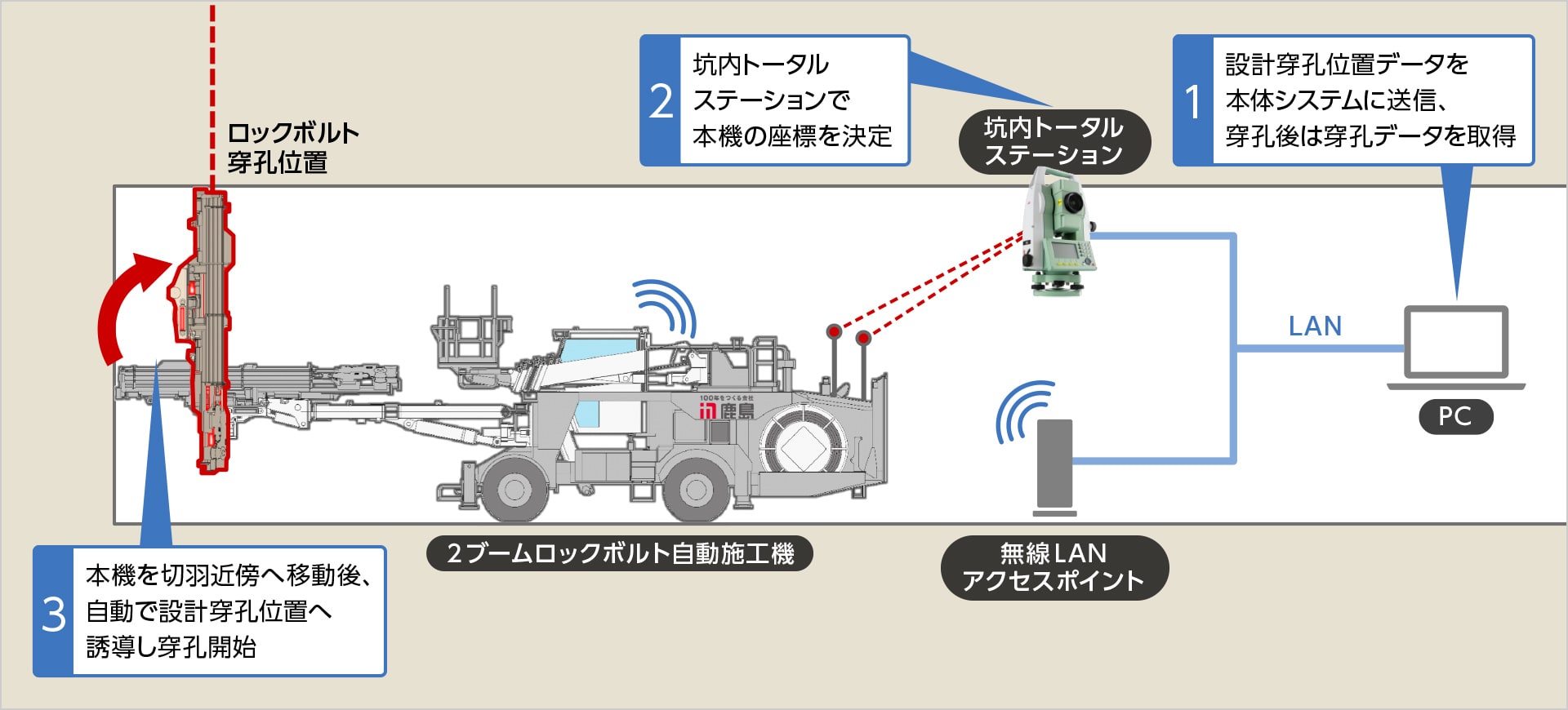
「穿孔位置の自動位置合わせシステム」の構成
自動ロックボルト打設装置
「自動ロックボルト打設装置」は、穿孔・モルタル注入・ボルト挿入の3つのセクションで構成されます。各セクションの切替は、回転動作のみで自動で行うことができます。本装置は左右のブームに装備され、3~6mのロックボルトに対応可能です。
❶穿孔セクション
コンピュータジャンボに搭載されている自動穿孔技術により、軟岩から硬岩までロックボルトの長さに合わせ安定した穿孔が可能です。
❷モルタル注入セクション
本機後方に配置したモルタル注入機と連動することで、左右同時にモルタルを自動注入できます。
❸ボルト挿入セクション
10本のロックボルトを装填できる「ロックボルトマガジン」を新規搭載しました。左右で最大20本のロックボルトを連続して自動挿入できます。
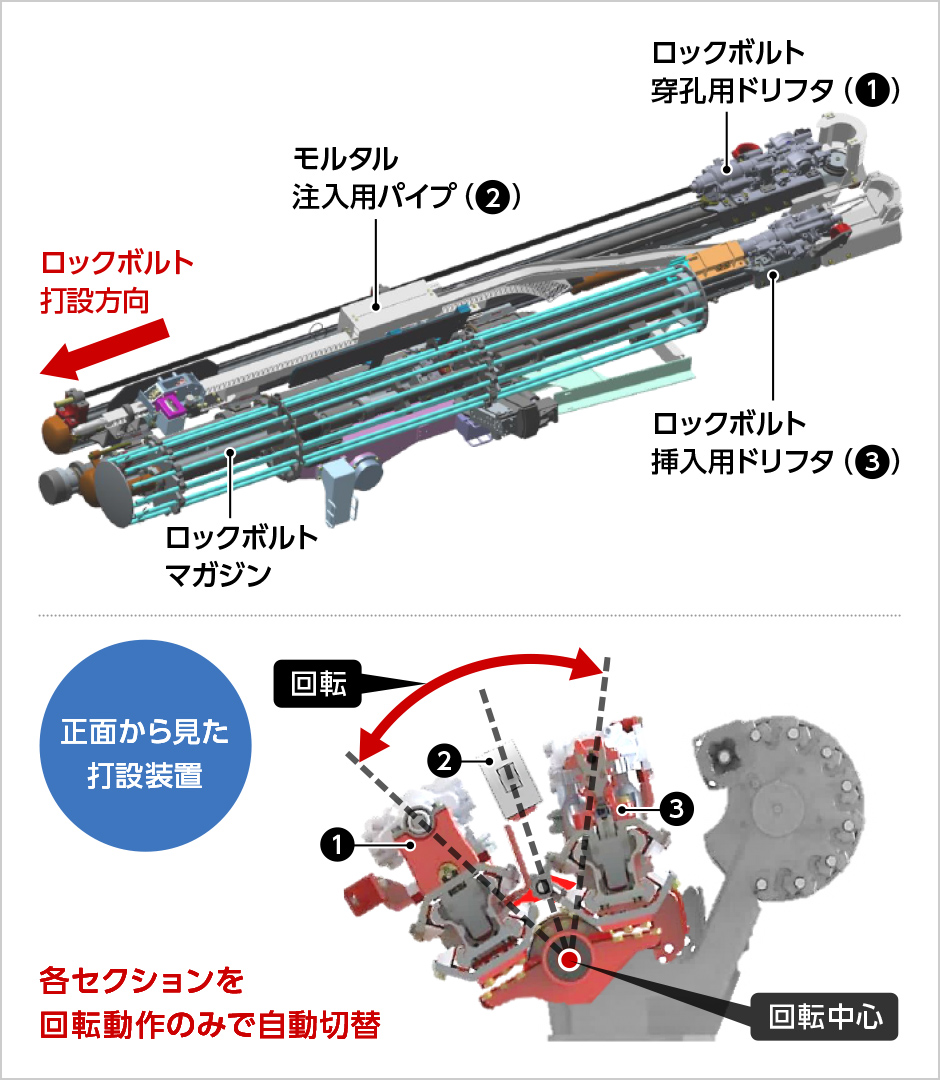
自動ロックボルト打設装置の概要
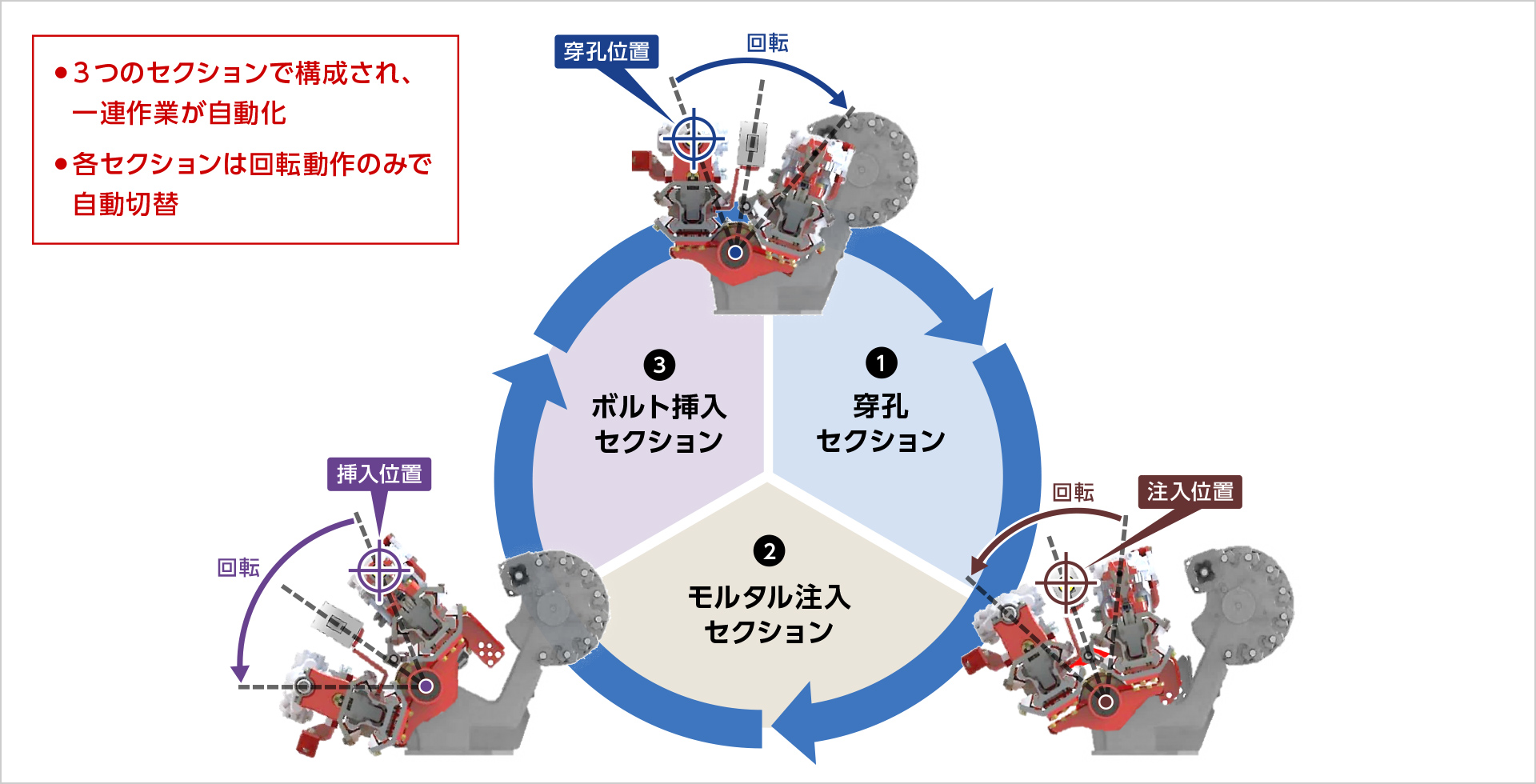
自動ロックボルト打設装置の仕組み
適用実績

神岡試験坑道
場所:岐阜県飛騨市
発注者:鹿島
規模:トンネル掘削321.3m
掘削断面積 アプローチ部43.9m2
自動化施工試験部73.5m2

