
[2019/07/18]
824KB
AI技術を活用したニューマチックケーソン工法における
掘残し幅計測システムを開発
~ケーソン函内の刃口と土砂の境界を正確に判別~
鹿島(社長:押味至一)は、三菱電機株式会社(執行役社長:杉山武史)、三菱電機エンジニアリング株式会社(東京都千代田区、社長:永友秀明)と共同で、ケーソン函内における刃口、土砂の境界及び掘削状況を函外から遠隔で正確に把握できる、ケーソン掘残し幅計測システムを開発しました。
本システムを適用することで、ケーソン内へ入出函することなく、掘削状況をリアルタイムかつ定量的に把握することが可能となり、潜函作業員の安全性と作業効率の大幅な向上を実現します。
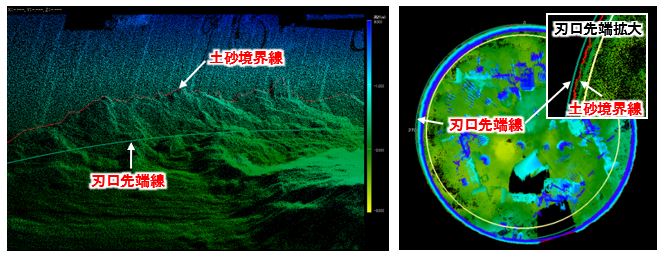
スキャンした3D点群データと、撮影した画像を組み合わせて分析し、
刃口と土砂の境界と、掘削状況を検出・表示する (左:点群表示、右:天面表示)
開発の背景
この対策として、掘削時にレーザー測量による掘削状況の計測を行っています。しかし、点情報であることや掘削機械による死角の影響に加え、撥ね付け土(掘削して仮置きした土砂)の判別などに課題があり、ケーソン刃口全体における掘残し幅を正確に把握できない問題点を修正できていませんでした。

ニューマチックケーソンの函内から見た
土砂境界部付近
本システムの概要
本システムは、ケーソン函内における刃口と土砂の境界と掘削状況を正確に把握できるシステムです。その構成は、ケーソン函内に設置した耐環境レーザースキャナ、刃口全周を画角に収める複数のネットワークカメラ、地上部に設置したパソコンの3点からなります。天井レールを走行する掘削機械の干渉を考慮し、中央部に据え付けるレーザースキャナは高さ20cmの小型の機器を新たに開発しました。また、ネットワークカメラは設置機器数の低減を目的に超広角カメラを採用しています。
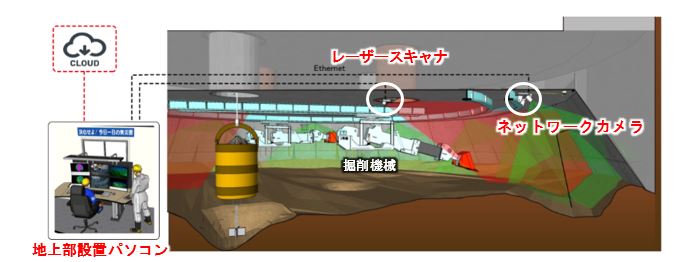
システム構成のイメージ
1.レーザースキャナによる境界検出処理
レーザースキャナで取得したケーソン函内の3D点群情報から、最も外周に位置する点列を検出した上で、ノイズ処理などの補正を行い刃口と土砂の境界線を算出します。2.ネットワークカメラ画像をもとにAI技術により土砂境界を推定
具体的には、収集した画像を短冊状にトリミングし、刃口と土砂の境界を指定した教師データを学習させることで、目視に近い識別精度を実現しました。
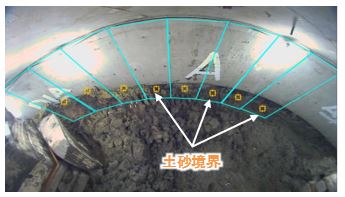
超広角カメラで撮影した画像
本システムの効果
本システムは、撥ね付け土などを除外した「真の掘残し幅」を、掘削作業中も遠隔からリアルタイムかつ正確に把握できるため、従来、潜函作業員が数十分から数時間費やしケーソン内へ入出函して行っていた計測作業そのものが不要となり、安全性と作業効率が飛躍的に向上します。
今後の展開
日々の計測で蓄積されるレーザースキャナによる境界線データを再学習用の教師データにすることで、新たな土質の現場であっても高精度な境界判別が可能となるシステムへ高度化させていきます。さらに、本システムから得られた掘削データと実際の沈下データを組み合わせ蓄積・分析することで、掘削と沈下の関係をより明確にし、分析結果を活用した精度の高い沈下予測や最適な掘削制御に活用できると考えています。
鹿島は今後、この技術を開削工事などの掘削工事の見える化に活用し、作業の安全性・効率性の更なる向上に向け、技術開発を進めていきます。
プレスリリースに記載された内容(価格、仕様、サービス内容等)は、発表日現在のものです。
その後予告なしに変更されることがありますので、あらかじめご了承ください。
