
[2021/10/20]
780KB
非GNSS環境下かつ暗所での自律飛行による点検ドローンを国内初の実用化
鹿島(社長:天野 裕正)は、非GNSS環境下かつ暗所でも自律飛行が可能なドローンを開発し、国内で初めて実用化しました。本ドローンは、飛行体の自律飛行を実現する制御技術を開発しているNEAR EARTH AUTONOMY※社(米国)が有する非GNSS環境下での飛行システム「Topaz」を、各種の実証を踏まえカスタマイズしたものです。2020年11月からは、安全性や生産性の向上を目指し、トンネル工事現場において、本ドローンを用いた無人での各種点検作業を実施しています。
※ LiDARを使用したリアルタイムマッピング及び、マッピングしたデータを使ったドローンを含む移動体の自己位置推定、自律制御システムを開発している企業。これらの技術はトンネルや地下空間、建築屋内空間など非GNSS環境の多い建設分野への適用性が高いと見込まれています。詳細はホームページ
![]() をご覧ください
をご覧ください

「Topaz」を搭載したドローン
開発の背景
トンネルや都市部での地下構造体の建設工事においては、工事区間の距離の長さ、ならびに移動に際し昇降を要する箇所の多さなどから、現場社員の各種点検作業が長時間に及ぶことがあり、生産性の向上を阻害する要因となっています。また、トンネル内や地下空間は暗く狭い場所も多いため、点検作業などを無人化することは安全性の確保にもつながります。
これに対し、近年では、ドローン技術の飛躍的な進歩により、建設業でも空撮・測量などの分野においてドローンの導入が進んでいます。しかしながら、ドローンの飛行性能はGNSSに依存する部分が多く、屋内や地下空間といったGNSS信号を受信できない環境下では、自動飛行や自律飛行が困難といった課題がありました。
実証実験とカスタマイズ
今回導入したTopazは、LiDAR SLAM技術(レーザー距離計による自己位置推定技術)を主軸に、Visual SLAM技術(画像による自己位置推定技術)を併用することにより、安定性・安全性・操作性を高めた高性能なシステムです。
当社は2019年12月に、トンネル工事現場2ヵ所、建築工事現場1ヵ所にてTopazを搭載したドローンによる実証実験を行い、非GNSS環境下でも安定した自律飛行が可能なことを確認しました。その後、当該実験結果を基に、独自のアルゴリズムにより、トンネルのような狭い暗所や地下工事のような障害物が存在する空間でも飛行安定性を確保できる機能を新たに開発し搭載しました。さらに本システムは、計画した飛行経路における自律飛行の可否を事前にシミュレータで確認できるため、より安全な運用が可能であり、これにより、あらゆる環境下での自律飛行が可能なシステムを実現しました。
本システムを用いて、2020年11月より、国内のトンネル工事現場にて、無人坑内点検(壁面の異常・漏水やガス漏れ等の有無の調査)を実施しています。

暗所(トンネル)での実証実験状況
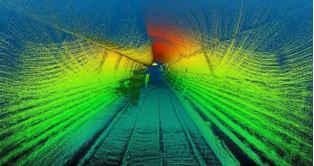
暗所飛行中に採取した点群データ

鹿島社員による運用状況
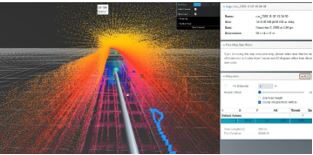
取得した点群データを用いたシミュレータ
今後の展開
トンネル工事現場や都市部の地下工事現場などの非GNSS環境下において、NEAR EARTH AUTONOMY社との協業により、現場調査や点検業務に本システムを搭載したドローンを積極的に活用することを検討しています。また、取得した点群データとBIM/CIMデータを重ね合わせることで、工事の進捗状況の見える化や、施工管理の効率化にも繋げていきます。さらには、これらを皮切りに、非GNSS環境下を含む全ての建設現場において、調査・点検業務の自動化を目指します。
プレスリリースに記載された内容(価格、仕様、サービス内容等)は、発表日現在のものです。
その後予告なしに変更されることがありますので、あらかじめご了承ください。
