
[2025/05/22]
774KB
バックホウ作業による既設構造物への接触や衝突を防止
~LiDARを用いた衝突防止システムを開発、実工事に適用~
鹿島(社長:天野裕正)は、鉄道やトンネル工事など、狭隘な施工環境でのバックホウ作業において、重機の接触や衝突による既設構造物等の損壊を回避するための衝突防止システム(以下、本システム)を開発しました。本システムは、バックホウに取り付けた2次元LiDARセンサの検知範囲内に既設の切梁や電線ケーブル等が入ると、作業中のバックホウを自動的に強制停止させ、それを警告ランプとブザー音によってオペレータに通知するものです。
本システムを、横浜高速鉄道株式会社が発注する「みなとみらい21線車両留置場建設工事」(以下、トンネル工事)および西武鉄道株式会社が発注する「新宿線中井~野方駅間連続立体交差事業に伴う土木工事第1工区(その24)」(以下、鉄道工事)に導入しました。その結果、バックホウと切梁など既設物との接触や衝突を防止し、作業中の安全性向上に寄与することを確認しました。

衝突防止システムを装着したバックホウ
開発の背景
狭隘な空間でのバックホウによる掘削作業は難度が高く、ブーム・アームが上下・旋回動作時に既設の切梁や電線ケーブルなどに接触・衝突し、それらを損傷させる恐れがあります。そのため、優れた技能を有する熟練オペレータが作業を担い、さらに接触・衝突する前にオペレータに危険を知らせる誘導員や監視員の配置を必要とする場合もありました。しかし、今後、熟練オペレータが高齢化等により減少していくことが避けられないため、オペレータの技量や誘導・監視員の指示に依存せず、さらには経験が浅いオペレータでも安全に作業できるような接触・衝突防止策が求められていました。本システムの概要
本システムは、物体を検知するための2次元LiDARセンサ(2台)、バックホウのブーム・アームの位置と機体傾斜を検知するための傾斜センサ(3台)、検知範囲を設定し物体を検知したことを認識するコンピュータ(1台)等で構成されます。バックホウの上方に位置する既設物への接触・衝突防止を主な目的として、一般的な中型サイズのバックホウ(0.25・0.45m3級)に本システムを装着しました。バックホウ作業中に切梁や電線ケーブル等の既設物が、事前に設定した検知範囲の中に入ると、バックホウを強制的に自動停止させ、同時にキャビン(運転席)内のモニターと警告ランプが点灯し、ブザー音でオペレータに知らせることができます。なお、検知範囲は施工条件を考慮し、モニター上で任意に設定することが可能です。
衝突防止システム機器設置状況

現場適用の効果
本システムを装着したバックホウを、トンネル工事における土砂積込み作業、鉄道工事における軌道下の地下掘削作業の2工事に導入しました。その結果、以下の効果を確認しました。- オペレータが目視で確認できない高さの既設物に対する接触・衝突の防止
- 絶対に傷つけたくない構造物に対する接触・衝突の防止
- 経験の浅いオペレータによるバックホウ作業の操作支援
- オペレータの不注意による接触・衝突の防止

トンネル工事における土砂積込み作業
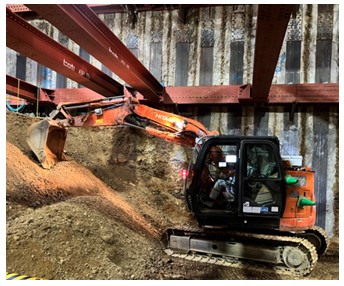
鉄道工事における軌道下の地下掘削作業
今後の展開
鹿島は今後、本システムを同種工事において長期に適用することで、システムの耐久性の検証を行います。また、センサによる検知のさらなる精度向上を図り、安全性向上を実現する技術として、全国の土木および建築工事へ普及・展開していくことを目指してまいります。工事概要
| 工事名 | : | みなとみらい21線車両留置場建設工事(土木工事) |
| 工事場所 | : | 神奈川県横浜市中区元町1丁目~新山下2丁目 |
| 発注者 | : | 横浜高速鉄道株式会社 |
| 施工者 | : | 鹿島・東亜・奈良特定建設工事共同企業体 |
| 事業名 | : | 西武鉄道新宿線(中井駅~野方駅間)連続立体交差事業 |
| 事業主体 | : | 東京都 |
| 工事名 | : | 新宿線中井~野方駅間連続立体交差事業に伴う土木工事第1工区(その24) |
| 工事場所 | : | 東京都中野区上高田5丁目付近 |
| 発注者 | : | 西武鉄道株式会社 |
| 施工者 | : | 鹿島・鉄建・戸田・五洋建設工事共同企業体 |
| 工期 | : | 2024年10月~2026年10月 |
プレスリリースに記載された内容(価格、仕様、サービス内容等)は、発表日現在のものです。
その後予告なしに変更されることがありますので、あらかじめご了承ください。
