
[2019/09/30]
327KB
照明設備の照度測定・調整作業を無人化!
自動測定・自動調整、自律走行機能を備えたロボットを開発
鹿島(社長:押味至一)は、建築工事において竣工直前に多くの手間と時間をかけて実施する、各照明設備の照度測定や調整作業の無人化を実現するロボットを開発しました。このたび愛知県と大阪府内で施工中の現場に適用し、その有用性を確認しました。本ロボットは、照度測定を自動で行い、その照度測定データを照明設備の明るさセンサーに送信し、照度調整までをワンストップで実施できる点に最大の特長を持っています。今後、本ロボットを様々な現場に適用のうえ改良を進め、将来的には照度測定以外のルーティン作業も無人化することで、更なる生産性の向上を図っていきます。

開発した照度測定・調整ロボット
開発の背景
建築工事では、建物の竣工直前に各設備機器の試運転や調整を行います。このうち、天井の照明設備については、机上面や床面の照度が設計値通りになるよう、全ての照明設備を対象に検査・調整する必要があり、検査対象は膨大となります。加えて、太陽光の影響を避けるため夜間に作業する必要があり、現場管理者に大きな負担となっていました。
昨年策定した「鹿島スマート生産®ビジョン」では、「作業の半分はロボットと」をコアコンセプトの一つに位置付け、繰り返しや厳しい環境下での作業、並びに自動化により効率や品質にメリットが得られる作業などを対象に、自動化・ロボット化を推進しています。
開発したロボットの特長
今回開発したロボットの特長は以下のとおりです。
- 照度測定を自動で行い、その測定データを建物側の明るさセンサーに送信し、照度の調整作業までワンストップで行うことが可能です。
- あらかじめ測定するエリアの図面データから照明と照度センサーの位置を読み込むことで、自動で走行経路を決定します。
- 走行時は、搭載したレーザーレンジファインダー(以下、LRF)が壁からの距離を計測して自己位置を認識し、正確にルートを走行します。ルート上に障害物があっても、LRFが障害物を認識するため、自ら回避して走行ルートに戻ります。さらに、走行しながら常時自己位置を確認・補正するため、正確に測定ポイントで停止し照度測定を行います。
- 照度測定にあたっては、照度計を搭載したアームが上下し、床面から一般的な机上面の高さ(800mm)までの範囲内で任意の高さの照度を測定、測定データは照明制御システムに送信され目標照度に調整します。床レベルの照度も測定できるため、非常照明にも適用できます。
- 照度測定動作は1箇所あたり2秒ほどで終わるため、短時間で効率的に測定を行います。
- 測定データは、品質記録として出力することができます。
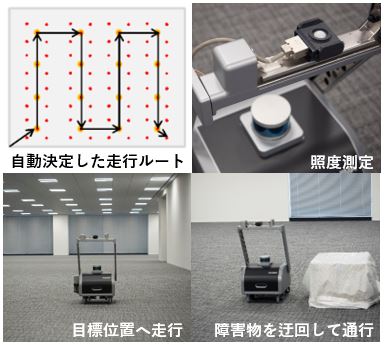
自動照度測定・調整ロボットの稼働状況
現場への適用
本ロボットを愛知県と大阪府内で施工中の現場に適用し、照度測定機能を検証したところ、熟練作業員と同等の測定結果が得られました。作業人数は従来と比較して約80%削減できました。
今後の展開
様々な現場での適用実績を蓄積することで改良を進め、将来的には騒音・温湿度測定などにも適用し、各設備機器の性能検証の更なる省力化・効率化を目指します。
鹿島は今後も、建築生産プロセスの変革を目指す「鹿島スマート生産ビジョン」の実現に向け、様々な技術開発に取り組んでいきます。
イメージ動画
(参考)
建築の生産プロセスを変革する 「鹿島スマート生産ビジョン」 を策定
(2018年11月12日プレスリリース)
プレスリリースに記載された内容(価格、仕様、サービス内容等)は、発表日現在のものです。
その後予告なしに変更されることがありますので、あらかじめご了承ください。
