
[2020/03/23]
993KB
トンネル内外の車両をシームレスに測位するシステムを開発
~現場全体の車両運行を見える化し一元管理~
鹿島(社長:押味至一)は、トンネル工事において坑内外の車両をシームレスに測位することで、現場全域の車両の運行を見える化し、一元管理を可能にするシステムを開発しました。
本システムは、工事車両が坑内外どちらを走行しているのか自動判定し、GNSS(グローバル衛星測位システム)電波の届かない坑内においても、車両の相互位置や走行方向を正確かつリアルタイムに検知できるものです。正確な車両の位置を一元管理することで、狭隘な坑内で限られた車両のすれ違い箇所を効果的に活用することや、リアルタイムな工事の進捗管理が可能となり、安全性と生産性の大幅な向上を実現します。
今般、本システムを高知県で施工中の日下川新規放水路工事に適用し、その効果を確認しています。

現場事務所での車両位置のモニタリング状況
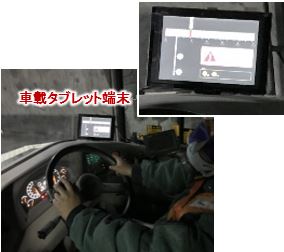
運転席のタブレット端末設置状況
開発の背景

狭隘なトンネル内での車両のすれ違い
本システムの概要
本システムは、タブレット端末を利用し、坑内外を走行する全ての車両の位置をシームレスに把握し、一元管理します。坑外では、既存のタブレット端末を使った運行管理システム「スマートG-Safe®」※の一部機能を活用してGNSSで測位する一方、坑内では、今回開発したWi-Fiとビーコン(発信機)の電波強度をハイブリッドに組み合わせた測位アルゴリズムを適用し、最大時速30kmに達する車両を正確かつリアルタイムに測位します。現在のトンネル工事では、坑内にデータ・音声通信用のWi-Fiアクセスポイントを設置することが標準となっているため、測位用に新たにアンテナを設置する必要はありません。また、坑内外走行の判定は車両に搭載するタブレット端末が自動的に行うため、システム切替え操作などは必要なく、ドライバーは運転に集中できます。
※鹿島が開発した大型車両の「すれ違い」管理および、積載物の輸送・出来高管理を自動化した車両運行管理システム
坑内外シームレス位置検知のイメージ
坑内でドライバーが見るタブレット端末画面は、トンネル内部の構造をデフォルメ表示し、すれ違い箇所や交差部を判別しやすくしています。加えて、入坑中の全車両の位置・種類・走行方向を表示するため、坑内の状況を正確に把握できます。
また、タブレット端末を利用してドライバーと現場管理者との双方向の通信も可能です。さらに、坑内での緊急時に、現場管理者から全ドライバーに発信する「緊急時一斉メッセージ」や、ドライバーから現場管理者と全ドライバーに発信する「緊急ボタン」の機能を備えています。

坑内でのドライバー画面
※クリックで拡大します![]()
■車両の運搬延べ台数に応じた工事の進捗管理
山岳トンネルの掘削は、穿孔・発破、ずり出し、吹付け、支保工設置、ロックボルト打設、という1サイクルの時間(サイクルタイム)を計測のうえデータ管理し、それら過去のサイクルタイムを分析して更なる生産性向上策を検討するのが一般的です。
本システムは、車種毎の切羽への到達回数を自動カウントできるため、トンネル掘削の進捗状況のリアルタイムかつ正確な把握が可能です。例えば、「あとダンプトラック2台でずり出しが完了」、「吹付け完了にはまだ4台のアジテータ車が必要」、といった情報を関係者間で共有できるため、よりタイムリーに次の行動に繋げることが可能となります。

車種別の切羽到達回数をカウントし、トンネル掘削の進捗状況をリアルタイムに把握
(ダンプトラック:ずリ出し、アジテータ車:吹付け)
※クリックで拡大します![]()
本システムの効果
坑内における車両の相互位置ならびに他車の種類・走行方向の正確かつリアルタイムな把握が可能なことから、坑口から坑内、坑内の交差部への進入可否などが判断しやすくなるとともに、限られた車両のすれ違い箇所を効率的に利用できるため、坑内での走行がスムーズになります。これにより、トンネル掘削の1サイクルタイムあたりの車両の待機時間が10%程度削減され、工事全体における生産性の大幅な向上を実現します。さらに、何ら操作することなく坑内外をシームレスに測位できるため、ドライバーの負担が軽減され、安全性が向上します。
今後の展開
今後は、トンネル掘削のサイクルタイムをリアルタイムに把握・分析するだけでなく、進捗状況をより詳細に把握することで、更なる生産性の向上に繋げていきます。また、本システムを山岳トンネル工事以外にも展開し、安全性と生産性のより一層の向上を目指します。
工事概要
| 工事名 | : 平成29-32年度 日下川新規放水路工事 |
| 発注者 | : 国土交通省 四国地方整備局 高知河川国道事務所 |
| 工事場所 | : 高知県高岡郡日高村 |
| 工期 | : 2018年1月~2021年3月 |
| 施工者 | : 鹿島建設株式会社 |
| 工事諸元 | : NATM、トンネル延長2,850m、幅員7.0m、掘削断面積55m2 |
プレスリリースに記載された内容(価格、仕様、サービス内容等)は、発表日現在のものです。
その後予告なしに変更されることがありますので、あらかじめご了承ください。
