
[2021/04/13]
553KB
超狭開先の現場ロボット溶接工法を開発
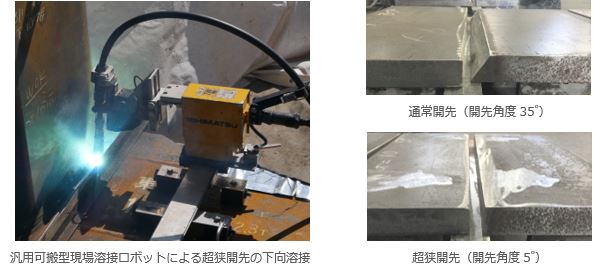
人では困難な溶接を汎用可搬型現場溶接ロボットで実現、実工事に初適用
鹿島(社長:押味至一)は、これまで培ってきたロボット溶接のノウハウを最大限に活用し、人では困難な超狭開先(開先角度0~5°)を対象とした現場溶接ロボット工法を開発しました。このたび、本工法を実工事に適用した結果、通常開先(開先角度35°)を対象とするロボット溶接工法と比べ、溶接歪みを40~70%に抑制でき、1日当たりの溶接箇所数を10%程度増やせることを確認しました。
当社は今後も、「鹿島スマート生産ビジョン」と働き方改革の実現に向け、本工法を新たなラインナップに加えた各種現場ロボット溶接工法の普及・展開を積極的に推進し、現場溶接作業の生産性と品質を向上していきます。
開発の背景
鉄骨造建物の建設工事における柱や梁の一般的な現場溶接では、接合部は35°の開先角度となります。この角度を小さくしていくことで溶接の断面積が減少し、作業時間削減による生産性向上やコスト低減、溶接熱の減少による溶接品質の向上、使用するCO2ガスや電力の使用量低減による環境負荷軽減が期待できます。
開先を狭めた狭開先(開先角度25~30°)といわれる溶接工法では、断面積を10~20%程度削減できるため、生産性向上やコスト低減のメリットが得られる反面、溶接の難易度が上がることで品質の確保が難しくなるなどの課題がありました。
超狭開先ロボット溶接の概要と特長
これまで蓄積してきた知見や、汎用可搬型現場溶接ロボットの開先形状のセンシング機能と安定した溶接施工能力を最大限に活用し、ほぼ平行ともいえる超狭開先(開先角度0~5°)を対象とした画期的な現場ロボット溶接工法を開発しました。本工法の概要および特長は以下のとおりです。
|
|
本工法の模式図 |
開先ごとの溶接工法の比較
実工事への適用
本工法を、首都圏で建設中のオフィスビル6フロアの梁上フランジの下向溶接358箇所に適用しました。その結果、通常開先と比較して、溶接歪みを40~70%抑制できた一方、1日当たりの溶接箇所数は約10%増やすことができ、品質面と溶接効率双方の向上を確認しました。

溶接前の開先形状(5°開先) |
|
溶接後の外観形状 |

今後の展開
今後、本工法を効果が得られやすい厚板の溶接に積極的に採用し、現場溶接作業の生産性と品質のさらなる向上と環境負荷軽減につなげていきます。また、鹿島スマート生産ビジョンと働き方改革の実現に向けて、現場溶接ロボット工法の改善・改良を行いながら実工事への普及・展開を促進していきます。
(参考)
建築の生産プロセスを変革する 「鹿島スマート生産ビジョン」 を策定
(2018年11月12日プレスリリース)
柱の全周溶接と梁の上向溶接に溶接ロボットを本格適用
(2019年2月13日プレスリリース)
マニピュレータ型現場溶接ロボットを開発、実工事に初適用
(2020年3月25日プレスリリース)
進化を続ける鹿島の現場溶接ロボット工法
(2021年3月30日プレスリリース)
イメージ動画
プレスリリースに記載された内容(価格、仕様、サービス内容等)は、発表日現在のものです。
その後予告なしに変更されることがありますので、あらかじめご了承ください。
