





A4CSEL®
(クワッドアクセル)
建設機械の自動運転を核とした自動化施工システム
建設作業の多くは人の手に頼ってきましたが、ここ数年、熟練技能者不足と高齢化だけでなく建設業就業者全体の大幅な減少傾向が続いています。また、年々減少しているものの労働災害件数の全産業における発生率は依然高い状態にあります。
これらの課題・問題の解決には生産性と安全性を飛躍的に向上させる施工システムが必要と考え、鹿島は、作業指示を送ることで、自動化された建設機械が自律・自動運転を行い、必要最小限の人員で多数の機械を同時に稼働させることをコンセプトとした、次世代の建設生産システムを実現しました。
A4CSEL(Automated / Autonomous / Advanced / Accelerated Construction system for Safety , Efficiency , and Liability)は、従来のリモコン等による建設機械の遠隔操作とは異なり、人間が複数の自動化建設機械に作業計画を送信することにより、無人で自動運転を行うものです。
第9回ロボット大賞 優秀賞
国土技術開発賞二〇周年記念大賞
平成30年度日本建設機械施工大賞 大賞部門最優秀賞
第19回国土技術開発賞 最優秀賞
平成28年度土木学会賞 技術開発賞
第46回日本産業技術大賞 文部科学大臣賞
特許登録済

A4CSELのダム堤体での施工イメージ
詳しくはこちらの特設サイトをご覧ください。
(別ウィンドウが開きます![]() )
)

関連情報
- キーワード
- 自動化、振動ローラ、ブルドーザ、ダンプトラック、ダム工事、生産性、効率化
適用実績

成瀬ダム堤体打設工事(第1期・第2期)
場所:秋田県東成瀬村
工期:2018年5月~2026年12月
発注者:国土交通省東北地方整備局
規模:台形CSGダム
堤高114.5m 堤頂長755.0m 堤体積485万m3

小石原川ダム本体建設工事
場所:福岡県朝倉市・東峰村
竣工年:2021年3月
発注者:独立行政法人水資源機構
規模:中央コア型ロックフィルダム
堤高139m 堤頂長約550m 堤体積約830万m3

大分川ダム建設(一期・二期)工事
場所:大分県大分市
竣工年:2019年11月
発注者:国土交通省九州地方整備局
規模:中央コア型ロックフィルダム
堤高91.6m 堤頂長496.2m 堤体積378.1万m3

五ケ山ダム堤体建設工事
場所:福岡県那珂川市
竣工年:2018年3月
発注者:福岡県
規模:重力式コンクリートダム
堤高102.5m 堤頂長556m 堤体積93.5万m3
学会論文発表実績
- 「振動ローラの自動転圧システムの開発 ― RCD ダム施工での試験適用」,土木学会,第70回年次学術講演会,2015年
- 「ブルドーザの自動撒出しシステムの開発」,土木学会,第70回年次学術講演会,2015年
- “Next Generation Construction Production System Focusing on Automation Technologies of Construction Machines”,The 7th Civil Engineering Conference in the Asian Region(第7回アジア土木技術国際会議) Proceedings,2016年
- 「建設機械の走行制御と目標経路生成について」,第16回計測自動制御学会システムインテグレーション部門講演会,2015年
振動ローラによる締固め管理システム
全地球衛星測位システム(GNSS)を利用した振動ローラ締固め管理システム
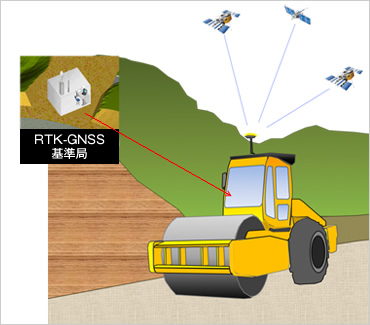
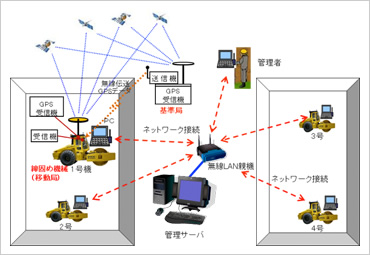
本システムは、RTK-GNSS測位法を利用した締固め機械の転圧回数管理システムです。
振動ローラの位置と各部の実転圧回数を段階的に色分けして、キャビン内のパソコンにリアルタイムで表示することで、締固め回数の過不足とその位置をオペレータが現場で把握することができます。また複数台の振動ローラを使用し施工している場合、お互いに他機が実施した転圧情報を共有することが可能で、複数の振動ローラで大量の施工を行う場合でも過不足のない転圧回数を維持継続することができます。
RTK-GNSS:測りたい移動局(未知点)の他に位置が分かっている固定局(既知点)を必要とする相対測位方式で、位置情報と誤差情報をリアルタイムに算定し移動局の測位を行う。
大分川ダム:令和元年度土木学会賞 技術賞(Ⅰグループ)
小石原川ダム:令和2年度土木学会賞 技術開発賞(遮水性盛土の総合的な品質管理法の開発)
システムイメージ図
- キーワード
- GNSS測量、RTK-GNSS、振動ローラ、締固め管理システム、転圧回数、品質向上
本システムの特長と主要構成機器
転圧管理
- 常時、現場で転圧回数の過不足を確認できます。
- 転圧データの共有化を図れます。
- 複数台の振動ローラ複数による同時施工においても、過不足のない転圧回数を維持継続できます。
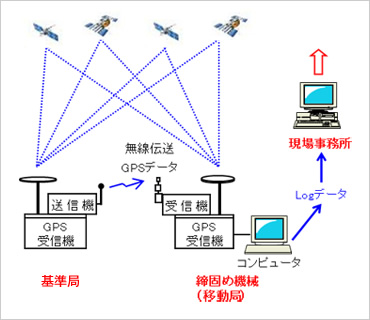
システム構成図
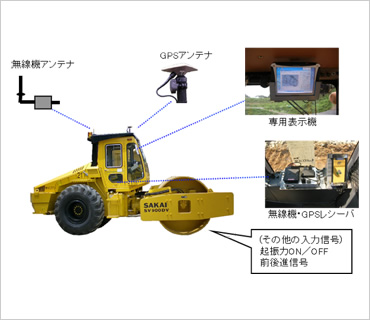
システム主要構成機器
本システムの機能
転圧回数管理
締固め回数を色で区別し、リアルタイムにモニタ表示することができます。
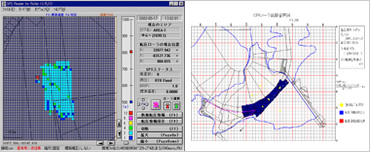
転圧回数管理画面/3D-CADによる転圧管理帳票
転圧データの共有化
複数台の振動ローラを使用する場合、他機の実施した転圧情報をリアルタイムに共有することが可能で、全施工エリアに対して過不足のない転圧回数を維持継続することができます。
システム構成図
適用実績

小石原川ダム本体建設工事
場所:福岡県朝倉市・東峰村
竣工年:2021年3月
発注者:水資源機構
規模:中央コア型ロックフィルダム
堤高139m 堤頂長558m 堤体積870万m3

大分川ダム建設(一期・二期)工事
場所:大分県大分市
竣工年:2019年11月
発注者:国土交通省九州地方整備局
規模:中央コア型ロックフィルダム
堤高91.6m 堤頂長400m 堤体積387万m3

五ケ山ダム堤体建設工事
場所:福岡県那珂川市
竣工年:2018年3月
発注者:福岡県
規模:重力式コンクリートダム
堤高102.5m 堤頂長556m 堤体積93.5万m3

新東名高速道路牧平
場所:愛知県岡崎市
発注者:中日本高速道路
規模:掘削153万m3 盛土80万m3

胆沢ダム
場所:岩手県奥州市
竣工年:2013年11月
発注者:国土交通省東北地方整備局
規模:堤体積1,350万m3

湯西川ダム
場所:栃木県日光市
竣工年:2012年9月
発注者:国土交通省関東地方整備局
規模:堤体積103.2万m3

殿ダム
場所:鳥取県鳥取市
竣工年:2012年1月
発注者:国土交通省中国地方整備局
規模:堤体積211万m3
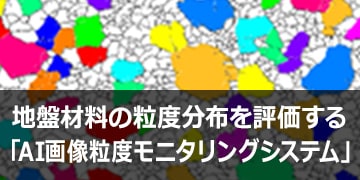
地盤材料の粒度分布を評価する
「AI画像粒度モニタリング®システム」
デジタルカメラ画像解析で地盤材料の粒度分布を迅速に判定
ダムなどの建設工事では、工事現場周辺で入手できる材料を有効的に使用することが基本であり、工事中は使用材料の品質管理を入念に行います。アースダムやロックフィルダム、台形CSGダムなどでは、使用材料の粒度分布を定期的に測定し、使用できる材料か否かを判断します。
鹿島では、市販のデジタルカメラで撮影した材料の画像を解析することで、使用材料の粒度分布を推定し、所定の品質を満足するか否かを瞬時に判定するシステム(AI画像粒度モニタリング)を開発しました。
本システムを活用することで、使用材料のリアルタイムな品質管理が可能となり、ダムなどの建設工事の高度化ならびに合理化に貢献できます。
2024年度エンジニアリング奨励特別賞
令和5年度ダム学会賞 技術開発賞
令和5年度地盤工学会賞 技術開発賞
平成23年度ダム工学会賞 技術開発賞
特許登録済
AI画像粒度モニタリングのイメージ
- キーワード
- デジタルカメラ、画像解析、粒度分布、品質管理、土質材料、ロックフィルダム、アースダム、CSG工法
システムの概要
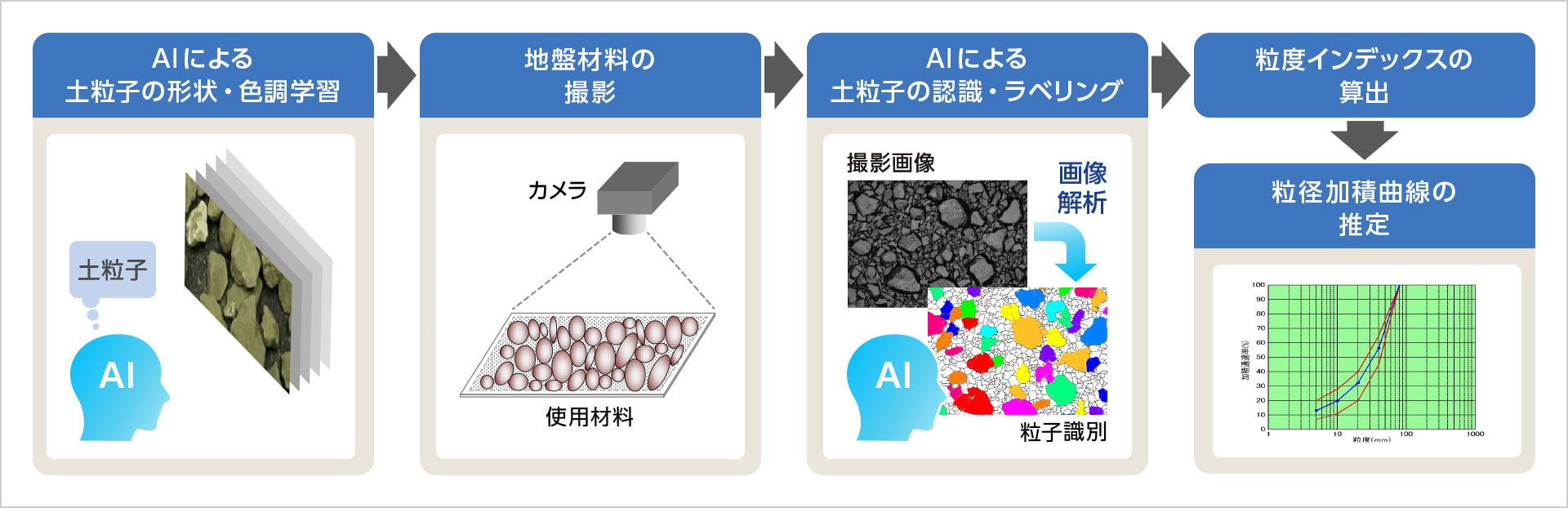
「AI画像粒度モニタリングシステム」は、地盤材料の画像から土粒子の輪郭を識別し解析することで、対象材料の粒度分布を測定するシステムです。土粒子の形状や色調を事前に機械学習したAIが、画像内の土粒子を認識します。画像上での各土粒子の大きさ(ピクセル数)をもとに、対象材料の粒度分布を求めます。
さらに、スマートデバイスでも土粒子の撮影・解析が可能なため、いつでも・どこでも・誰でも・簡単に対象材料の粒度分布が測定できます。
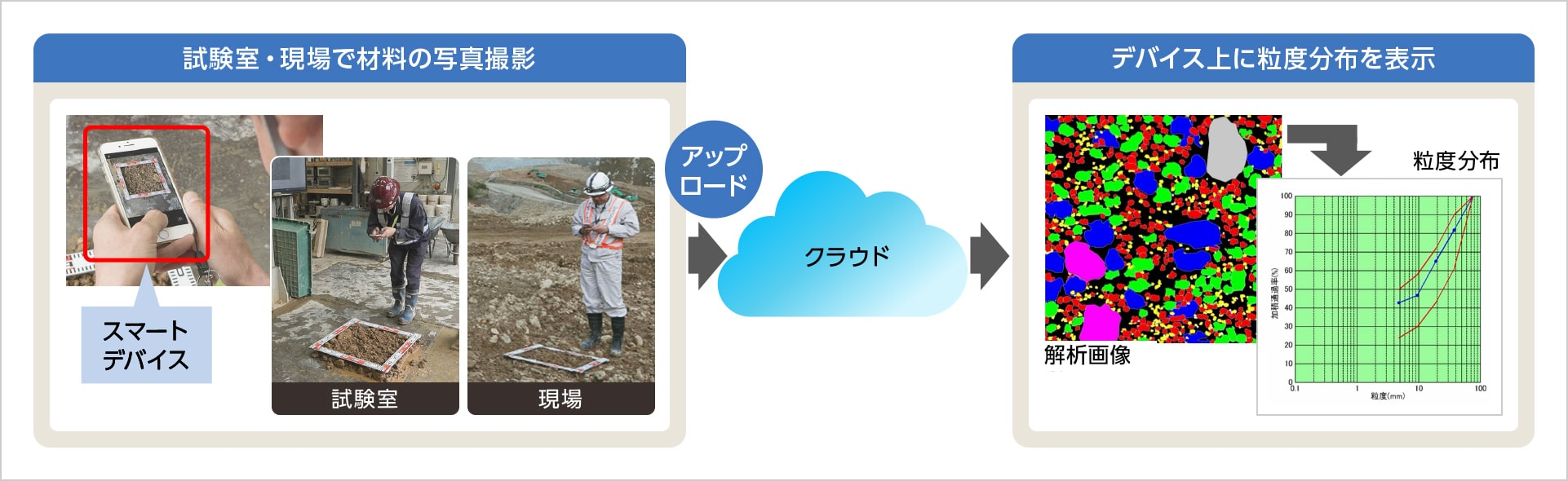
システムの構成
特長・メリットココがポイント
実際の施工現場での適用実績あり
画像粒度モニタリングはすでに鹿島の建設現場で活躍しています。
- CSG製造時のCSG材品質管理(最大粒径80mm)
- ロック材の品質管理(最大粒径500mm)
- CSG材製造管理(最大粒径80mm)
迅速な判定が可能
従来の粒度試験方法に比べて、粒度分布を得るために要する時間を大幅に短縮できます。
- CSG材の場合、3秒程度(従来の簡易方法による試験の場合は1時間)
- ロック材の場合、10分程度(従来の試験方法の場合1日程度)

ロック材の撮影画像の例
新しい品質管理方法で試験作業を大幅低減
台形CSGダム建設工事のCSG製造設備に「AI画像粒度モニタリングシステム」と近赤外線水分計を設置し、CSG材の粒度分布および含水率の変動監視を実施しています。これにより、材料品質の試験業務に係る人員を約9割削減しました。さらに、測定した粒度分布と含水率から表面水量を算出し、自動で配合切替を行いながら平均300m3/hで連続供給されるCSG全量の品質を間断なく管理しています。
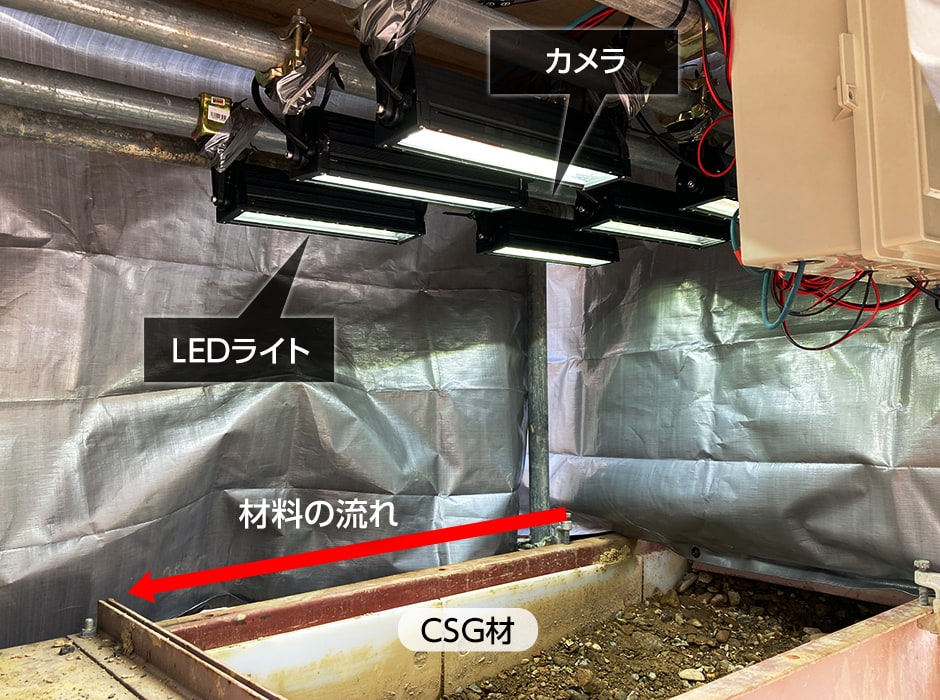
AI画像粒度モニタリングを使った新しい品質管理方法
適用実績

成瀬ダム堤体打設工事(第1期・第2期)
場所:秋田県東成瀬村
工期:2018年5月~2026年12月
発注者:国土交通省東北地方整備局
規模:台形CSGダム
堤高114.5m 堤頂長755.0m 堤体積485万m3

H26-30長安口ダム 施設改造工事
場所:徳島県那賀郡
竣工年:2020年3月
発注者:国土交通省四国地方整備局
型式:重力式コンクリートダム
規模(既設ダム):堤高85.5m 堤頂長200.7m 堤体積28.3万m3 既設堤体切削撤去8,328m3

小石原川ダム本体建設工事
場所:福岡県朝倉市・東峰村
竣工年:2021年3月
発注者:水資源機構
規模:中央コア型ロックフィルダム
堤高139m 堤頂長558m 堤体積870万m3

大分川ダム建設(一期・二期)工事
場所:大分県大分市
竣工年:2019年11月
発注者:国土交通省九州地方整備局
型式:中央コア型ロックフィルダム
規模:堤高91.6m 堤頂長400m 堤体積387万m3

胆沢ダム
場所:岩手県奥州市
竣工年:2013年11月
発注者:国土交通省東北地方整備局
型式:中央コア型ロックフィルダム
規模:堤高132m 堤頂長723m
堤体積1,350万m3

当別ダム
場所:北海道石狩郡
竣工年:2012年11月
発注者:北海道
型式:台形CSGダム
規模:堤高52m 堤頂長432m 堤体積81.3万m3

殿ダム
場所:鳥取県鳥取市
竣工年:2012年1月
発注者:国土交通省中国地方整備局
型式:中央コア型ロックフィルダム
規模:堤高75m 堤頂長294m 堤体積211万m3
学会論文発表実績
- 「CSG材の表面水量全量管理システム ─システムの構成─」,土木学会,第79回年次学術講演会,2024年
- 「成瀬ダムにおけるCSG材の表面水量の全量管理技術」,ダム工学研究発表会,2023年
- 「デジタルカメラ画像を用いたロック材の粒度解析システム」,土木学会,第67回年次学術講演会,2012年
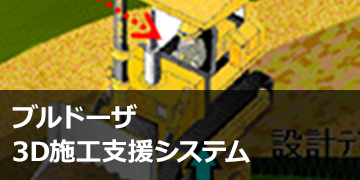
ブルドーザ3D施工支援システム
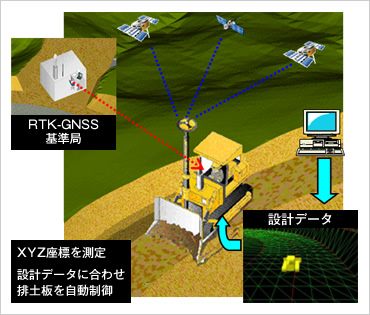
全地球衛星測位システム(GNSS)を利用したブルドーザ施工支援システム
本システムは、RTK-GNSS測位法を利用したブルドーザの施工補助システム(MG)と施工自動制御システム(MC)です。GNSSから得られるブルドーザの3D位置データと3D設計データから現地盤と設計地盤との差をリアルタイムに算出し、キャビン内のモニタに設計地盤との差を表示するMG(Machine Guidance)システムと排土板を設計地盤の高さと勾配に合わせて自動制御するMC(Machine Control)システムがあります。いずれのシステムでも作業の大幅な効率化や品質の向上・均一化が図れます。
RTK-GNSS:測りたい移動局(未知点)の他に位置が分かっている固定局(既知点)を必要とする相対測位方式で、位置情報と誤差情報をリアルタイムに算定し移動局の測位を行う。
システムイメージ図
- キーワード
- GNSS測量、RTK-GNSS、ブルドーザ、施工支援、施工の効率化、品質向上
本システムの特長と主要構成機器
- 撒出し時の丁張り及びトンボなどの測量作業は不要です。
- 重機位置がリアルタイムに表示されるので、施工エリアへの誘導が容易に行えます。
- 作業速度の効率化と仕上がり精度の向上が図れます。
- 斜面、曲線部などの複雑な施工にも対応可能です。
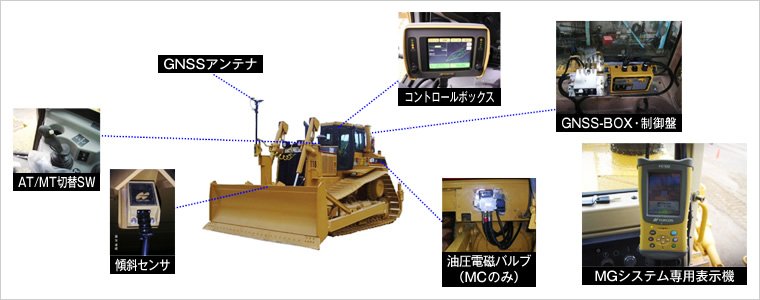
システム主要機器
特長・メリットココがポイント
MGシステム(Machine Guidance)
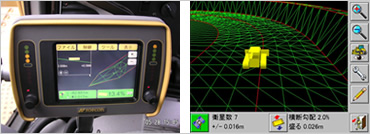
縦断、横断、勾配、曲線などを含めた設計地盤と現在の排土板位置との差をモニタにリアルタイムに表示できます。

MGシステム専用表示機
MCシステム(Machine Control)
設計地盤や設定した高さに合わせて、排土板位置を自動制御することができます。
MCシステム コントロールボックス/表示画面
適用実績

京極発電所
場所:北海道虻田郡
発注者:北海道電力
規模:堤体積125.1万m3

胆沢ダム
場所:岩手県奥州市
発注者:国土交通省東北地方整備局
規模:堤体積1,350万m3

湯西川ダム
場所:栃木県日光市
竣工年:2012年9月
発注者:国土交通省関東地方整備局
規模:堤体積103.2万m3

殿ダム
場所:鳥取県鳥取市
竣工年:2012年1月
発注者:国土交通省中国地方整備局
規模:堤体積211万m3

徳之島ダム
場所:鹿児島県大島郡
竣工年:2012年1月
発注者:九州農政局
規模:堤体積88.9万m3
バックホウ3D施工支援システム
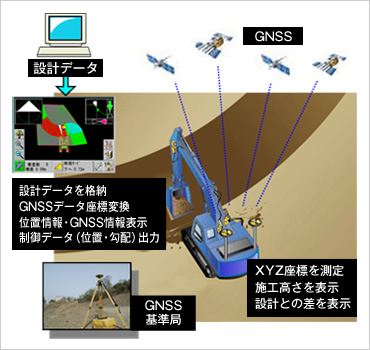
全地球衛星測位システム(GNSS)を利用したバックホウ施工支援システム
本システムは、RTK-GNSS測位法を利用したバックホウの施工支援システムです。
GNSSから得られるバックホウの3D位置データとブーム、アーム、バケットに取付けた角度センサのデータからバケット刃先位置をリアルタイムに算出し、設計データと共に刃先位置をキャビン内のモニタに表示します。オペレータはモニタの画面より設計データとバケット刃先の現在位置の差を常時確認できるので、丁張がなくても法面の施工を容易に行えます。
RTK-GNSS:測りたい移動局(未知点)の他に位置が分かっている固定局(既知点)を必要とする相対測位方式で、位置情報と誤差情報をリアルタイムに算定し移動局の測位を行う。
システムイメージ図
- キーワード
- GNSS測量、RTK-GNSS、バックホウ、施工支援、施工の効率化、品質向上
本システムの特長と主要構成機器
- 設計データとバケット刃先の現在位置を常時確認できるので、丁張がなくても法面の施工を容易に行えます。
- 重機位置がリアルタイムに表示されるので、施工エリアへの誘導が容易に行えます。
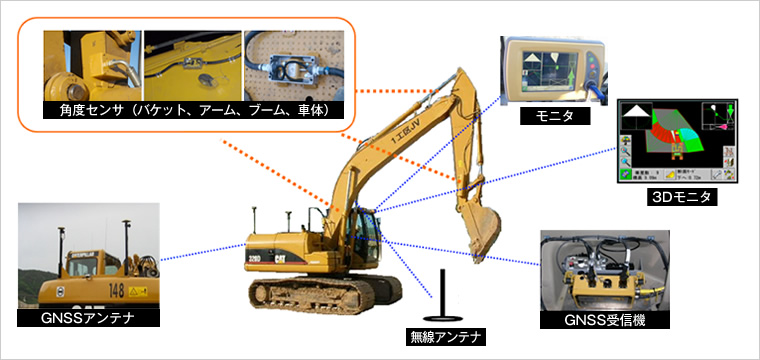
システム主要構成機器
特長・メリットココがポイント
3Dによる高度な施工支援機能
- 走行・出来高記録機能:当該重機の走行履歴や施工エリアでの出来高の記録
- 面合せ設定:掘削する面とバケット軸の合せ設定
- 掘削断面表示:掘削する面の画面上での断面表示
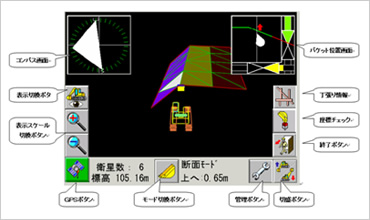
3D仕様の表示画面
2D仕様でも可能な施工支援機能
- 勾配設定:指定した勾配での掘削作業
- 深さ設定:指定した深さの掘削作業
- 距離測定:斜距離や水平距離のバケット移動距離測定

2D仕様の表示画面
適用実績

胆沢ダム
場所:岩手県奥州市
発注者:国土交通省東北地方整備局
規模:堤体積1,350万m3

京極発電所
場所:北海道虻田郡
発注者:北海道電力
規模:堤体積125.1万m3

当別ダム
場所:北海道石狩郡
竣工年:2012年12月
発注者:北海道空知総合振興局
規模:堤体積81.3万m3
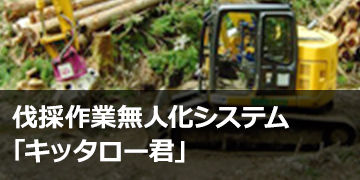
伐採作業無人化システム
「キッタロー君®」
運転席搭載型ロボットによる伐採作業の無人化施工システム
中間貯蔵施設の建設工事では、山林の伐採作業が多く発生することが予想されますが、山林は住宅地、道路と違い未除染区域であることから、重機オペレータの被ばく量低減が重要な課題です。
鹿島では、運転席に搭載するだけで様々な重機を遠隔操作できる人工筋肉ロボット「アクティブロボットSAM※1」と、伐採用アタッチメントである「フェラーバンチャザウルスロボ※2」を組み合わせた伐採用無人化施工システム「キッタロー君」をコーワテックと共同開発しました。
※1 コーワテックの製品
※2 松本システムエンジニアリングの製品

フェラーバンチャ仕様伐採重機
- キーワード
- 遠隔操縦、リモコン重機、人工筋肉ロボット、人工筋肉、伐採、伐倒、抜根、フェラーバンチャ、A-SAM、キッタロー君、
無人化、ロボット、ラジコン、自動化、建設機械
システムの概要
人工筋肉ロボット(A-SAM)は、搭載型の遠隔操縦ロボットで、重機の機種やメーカーに限定されることなく、運転席に搭載することで遠隔操縦を実現できます。人工筋肉とは、エアチューブに入れるエア圧力を制御し、エアチューブ膨張時の収縮を利用した機構です。
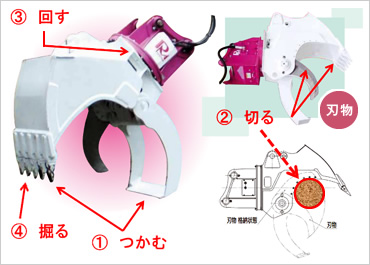
従来の伐採工事は、チェーンソーを使った手作業が主体でしたが、近年は機械化施工が進んでいます。伐採用アタッチメント(フェラーバンチャ)は、伐採工事で使う複数の作業を可能にするアタッチメントで、立木の伐倒、抜根、木材の移動、掘削、転圧の5つの機能を有しています。

人工筋肉ロボット(A-SAM)
フェラーバンチャの機能
システムの特長
人工筋肉ロボットによる遠隔操作
人工筋肉ロボットは、重量52kg程度で、3分割が可能で、運転席への設置も2名で1時間程度で行うことができます。また、リモコンでの遠隔操作については、目視並びにカメラ映像による操作が可能で、10分程度の練習で行うことができます。

リモコン及び運転操作状況(カメラ画像による運転)


遠隔操作の様子(動画:30秒/音あり)
伐採用アタッチメント(フェラーバンチャ)
フェラーバンチャはベースマシンとなる油圧ショベルのバケット部に装着するアタッチメントですが、伐採する木材をつかむ⇒切る⇒切ったまま把持⇒移動⇒集積まで、伐採工事で行う複数の作業を1台で行うことができ、作業の大幅な効率化が図れるとともに、オペレータの被ばく量を大幅に低減することができます。

人工筋肉ロボット(A-SAM)搭載の伐採重機運転状況

伐倒の様子(動画:30秒/音あり)
プレキャストブロック自動据付システム
汎用建設機械にカメラ、人工筋肉ロボット等を搭載してブロックを自動据付
2011年の大雨による土砂災害復旧工事である赤谷3号砂防堰堤工事は、崩落斜面直下での作業となるため、6月~10月の出水期には人が立ち入れず、無人化施工が前提条件になります。従来の無人化施工はカメラモニタを見ながらの遠隔操作になるため、カメラの死角などによる作業効率の低下やオペレータの疲労による誤操作のリスクがありました。
そこで、自動化、ロボット化の効果が高い繰り返し作業であるプレキャストブロックの据付を自動化しました。汎用重機にカメラや人工筋肉ロボットを搭載し、ブロックの位置測量にはARマーカによるAR測量を適用しました。
本システムにより、遠隔操作による無人化施工と比較して20%以上の生産性向上を図り、オペレータの疲労を大幅に低減しました。また、GNSS受信圏外でも自動化施工を実施することができます。
特許登録済
令和3年度土木学会 技術賞(Ⅰグループ)
2022年度エンジニアリング功労者賞
令和4年度建設施工と建設機械シンポジウム 優秀論文賞
令和4年度地盤工学会 技術業績賞
令和5年度日本建設機械施工大賞 最優秀賞

プレキャストブロック自動据付(全景、操作室内)(動画:59秒/音なし/2倍速)
関連情報
- キーワード
- 災害復旧、無人化施工、遠隔操作、プレキャストブロック、コンクリートブロック、自動化、汎用重機、カメラ、ARマーカ、
AR測量、人工筋肉ロボット、省人化、負担低減、生産性向上、高精度
システムの概要
本システムは高価な自動化専用の建設機械ではなく、汎用バックホウに各種センサ等を装備することにより、精度よく重機姿勢を算出します。
キャビン上部に搭載したカメラを用いてプレキャストブロックに貼り付けたARマーカを画像認識し、AR測量によって動作の目標座標とブロック面の角度を瞬時に算出します。これらの情報を元に独自開発した自動運転システムにより、ブロック面の角度を含めた自動運転指示データを作成します。この自動運転指示データに従って汎用バックホウの運転席に設置した人工筋肉ロボットを自動制御します。
これらの技術によって誤差10mm以下の高い精度で、プレキャストブロック据付の自動化を実現しました。
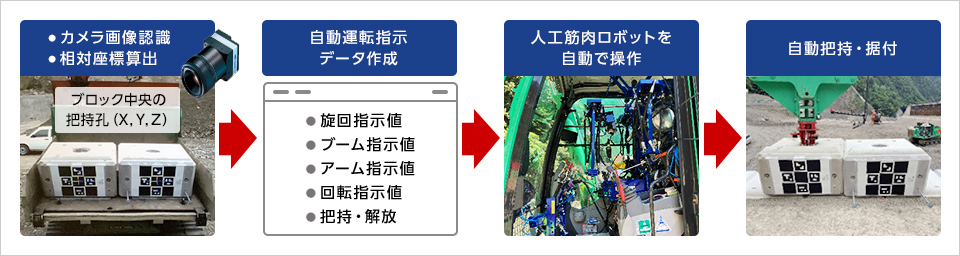
自動運転フロー

位置計測方法と人工筋肉ロボット
特長・メリットココがポイント
無人化施工に比べ20%以上の生産性向上
遠隔操作による無人化施工では、把持操作や据付の微調整、再設置など多くの時間を要していましたが、自動運転により、微調整や再設置操作が不要となり20%以上の生産性を向上させることができます。
有人施工ではブロック揚重のクレーンオペレータや玉掛者、測量など、5名程度の作業員が必要なのに対して、自動化施工ではオペレータ1名で実施できます。
また、オペレータ1名で複数台の重機を自動運転操作させることにより、更なる生産性向上と省人化が期待できます。

プレキャストブロック据付 自動化施工状況
オペレータの疲労による誤操作リスク低減
無人化施工では複数のカメラモニタを凝視しながら、長時間にわたって遠隔操作するため、オペレータの疲労を助長し、誤操作のリスクがあります。自動運転によって、オペレータの作業はモニタを見ながらの監視と異常時の対処のみとなり、誤操作リスクを大きく低減できます。

自動運転監視状況(操作室)
汎用重機に自動化設備を装備して自動運転が可能
本システムは汎用の重機(今回:バックホウ)にカメラや人工筋肉ロボット、計測機器等を後付けして自動運転を実施することが可能です。
システム開発などの準備期間が短くて済み、災害復旧などの急を要する現場での無人化施工や自動運転に迅速に対応することができます。

汎用バックホウに設置する自動運転用設備
適用実績

赤谷3号砂防堰堤工事
場所:奈良県五條市
竣工年:2023年3月
発注者:国土交通省近畿地方整備局
規模:プレキャストブロック×824個
学会論文発表実績
- 「大型プレキャストブロック据付の自動化施工」,建設施工と建設機械シンポジウム,2022年
- 「赤谷3号砂防堰堤工事におけるブレキャストブロック据付の自動化施工」,基礎工,2022年1月号
- 「大型プレキャストブロック据付の自動化施工」,建設機械施工,2022年4月号
- 「大型プレキャストブロック自動据付システムの開発」,土木学会,第76回年次学術講演会,2022年
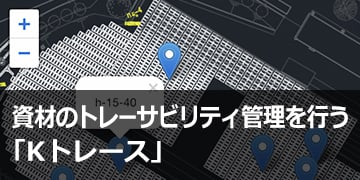
資材のトレーサビリティ管理を行う
「Kトレース®」
各資材の個別情報と位置情報を紐づけて一元管理
建設現場では、大量の資材を仮置き場に保管し、適宜抽出して使用する場面があります。その際、仮置き場においては、類似した資材や寸法が異なる資材が多数存在する、また、資材を置く順番と使用する順番が異なる等、使用資材の選定間違いが発生しやすい状況があります。その対策として、各資材の認識番号等の個別情報と位置情報を仮置きの際に記録・保存する方法等が実施されていますが、これを手作業で行う場合、人為的な間違いが発生する懸念があります。また、記録作業や資材を抽出する作業に多大な労力と時間を要することも課題でした。
そこで、資材の個別情報(寸法、重量、写真)をWEB上に登録し、GNSSで取得した位置情報と紐付けることで、大量の資材の位置情報を瞬時に把握できるシステム「Kトレース®」を開発しました。
2024年度エンジニアリング功労者賞 奨励特別賞

資材位置の登録

資材位置の検索・表示
関連情報
- キーワード
- WEBアプリ、資材個別情報(寸法、写真、重量等)、位置情報、検索
作業手順
Kトレースを丸亀城石垣崩落復旧整備事業(2018年の豪雨および台風で崩落した石垣の復旧工事)の石材管理に適用しています。

石垣崩落部の解体作業(丸亀城石垣崩落復旧整備事業)

仮置きされた石材
記録手順(丸亀城石垣復旧事業 解体・仮置き時)
1)資材(石材)の個別情報(認識番号、寸法、重量、写真)をKトレースに登録する。

資材の写真撮影

寸法測定
2)石材を仮置場に搬入し、石材の位置が確定したらKトレースを起動してGNSSによる測位を行い、位置情報と個別情報を紐付けて保存する。

仮置き位置の測位と個別情報紐付
検索手順(丸亀城石垣復旧事業 復旧時)
作業当日、使用する資材を仮置き場で探す際は、認識番号を入力し、検索することで、仮置き場内の各資材の位置を図面上に瞬時に表示。
資材検索画面(スマートフォン画面)

資材検索結果画面
特長・メリットココがポイント
- 個別情報と位置情報とを紐付けて保存し、検索により図面上に瞬時に表示できるため、大量に存在する資材の中から必要な資材を簡易・迅速・正確に抽出可能。
- 個別情報と位置情報とが自動的に紐付けられるため、記録時の人為的な間違いが生じない。
- 外部測位サービスを付加することで、より正確な位置情報(水平精度±5cm)の把握が可能。
- データはクラウドサーバに自動保存されるため、記録用PCなどからデータを移行する手間がなく、保存と同時にRPAでデータ処理することも可能。
- WEB上のシステムのため、使用時のインストールは不要。インターネットに接続できる環境であれば、スマートフォンやタブレットなどのデバイス機器での利用が可能。
適用実績

丸亀城石垣崩落復旧整備事業
場所:香川県丸亀市一番丁 丸亀城内
竣工年:2028年3月(予定)
発注者:香川県丸亀市
規模:石垣復旧面積 約2,630m2
(帯曲輪1,160m2、三の丸1,470m2)
石材回収個数 約11,000個
