


放射線環境下における解体がれきの自律搬送システム
福島第一原発における高線量がれきを人の手を介さず自動搬送
東京電力福島第一原子力発電所の解体工事のがれき撤去・解体工事は、放射線環境下の作業となるため、監視カメラや無線システムを利用した遠隔操作による無人化システムが適用されてきました。
鹿島では、放射線環境下における作業員の被ばく量の抑制と、遠隔操作で問題となる作業効率の向上を目指して、高線量がれきの搬送作業を、従来の遠隔操作ではなく、人手を介さず自動で行う自律搬送システムを開発、実用化しました。汎用重機を改造して自動化し、厳しい環境下の施工現場での実稼働は日本初です。
特許登録済
平成24年度土木学会 技術開発賞
2014年日本ロボット学会 実用化技術賞
平成26年度建設施工と建設機械シンポジウム 優秀論文賞

クローラダンプへの自動化機器の実装
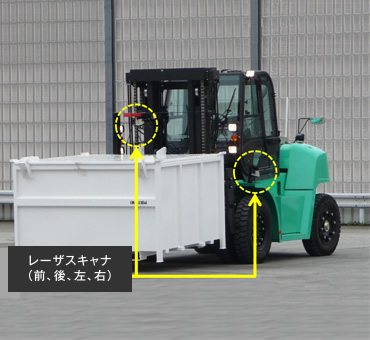
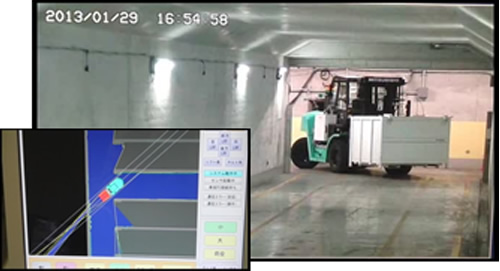
レーザスキャナ搭載のフォークリフト
- キーワード
- 自動運転、自律制御、クローラダンプ、フォークリフト、放射線、解体工事、安全性、効率化
システムの概要
本システムは、高線量がれきを積み込んだ鋼製コンテナを原子炉建屋から構内保管施設まで搬送する1kmのクローラダンプによる屋外走行、そして、構内保管施設内で、保管場所まで運ぶ往復約800mのフォークリフトによる屋内走行の二つの作業を対象として、それぞれの搬送機械に自動制御装置、及びセンサ類を搭載して計測・認識機能を持った機械に改造し、搬送作業を自動で行うものです。
従来の遠隔操作による無人化施工システムでは、現場作業はオペレータの技量に頼らざるを得ず、その差によって作業時間にバラツキがありましたが、本システムによりオペレータの技量に関係なく一定時間での作業が可能となりました。本システムでは自動機械を新たに作るのではなく、汎用機械に計測・制御技術を付加することによって自動化を実現しているため、開発コストを抑制でき、また、適用した要素技術は他の機械へも容易に展開することが可能となっています。
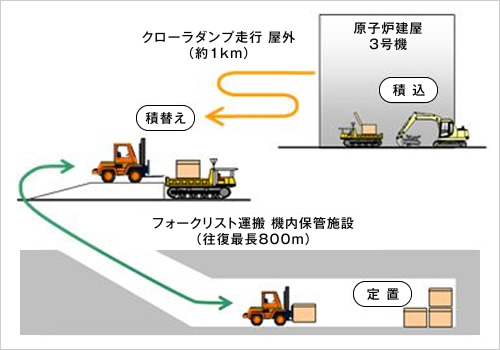
システムイメージ
クローラダンプ自律走行システム
汎用のクローラダンプに様々な計測機器とコンピュータを搭載し、事前に設定した走行路上の前方障害物の有無などをリアルタイムで計測、認識、判断、制御することによって目的地まで無人かつ全自動で走行させます。クローラダンプへの自動運転指示や、自動運転中の状況監視は前方を走行する先導車から行っています。
従来の搬送作業では、先導車からクローラダンプを直接見ながら遠隔操作によって運転するため、クローラダンプに10~30mの距離まで近づく必要がありましたが、本システムでは100m程度の距離から指示、監視するだけで良いので、被ばく量が1/10以下に低減できました。

屋外を自律走行するクローラダンプ
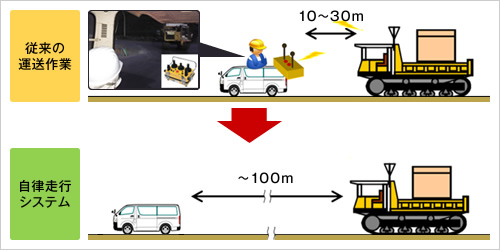
自律走行クローラダンプの効果
フォークリフト自動走行システム
構内保管施設内では、地上の入口から保管場所まで傾斜7%のスロープや切り返し部を含む最少幅5mの走路を約800m走行します。屋内ではGPSによる位置計測ができないため、フォークリフトの前後左右に設置した4台のレーザスキャナによって車体周囲の空間形状を計測し、その形状を保管庫図面データと照合して機体の相対位置姿勢をコンピュータで推定します。この他、走行路状況を計測・認識して、障害物検知や保管施設との衝突回避を行いながら自動で走行します。
自律走行中のフォークリフトと位置姿勢推定
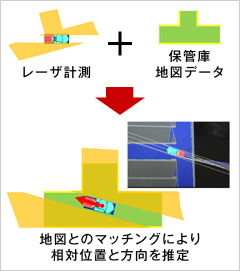
レーザスキャナによる位置姿勢推定法
適用実績

福島第一原子力発電所解体工事
場所:福島県双葉郡
発注者:東京電力
学会論文発表実績
- 「放射線環境下における搬送作業の自動化」,土木施工,VOL.54,No.1,2012年
- 「放射線環境下における搬送作業の自動化」,土木学会,第68回年次学術講演会,2013年
- 「放射線環境下における建設機械の自動運転システム」,第31回日本ロボット学会学術講演会,2013年
- 「放射線環境下における建設機械の自動運転システム」,平成26年度建設施工と建設機械シンポジウム論文,2014年
- 「放射線環境下における搬送作業の自動化システムの開発 ~無人化・自動化施工技術を応用した高線量がれきの自動搬送~」,土木学会誌,2015年
動植物・環境モニタリングシステム
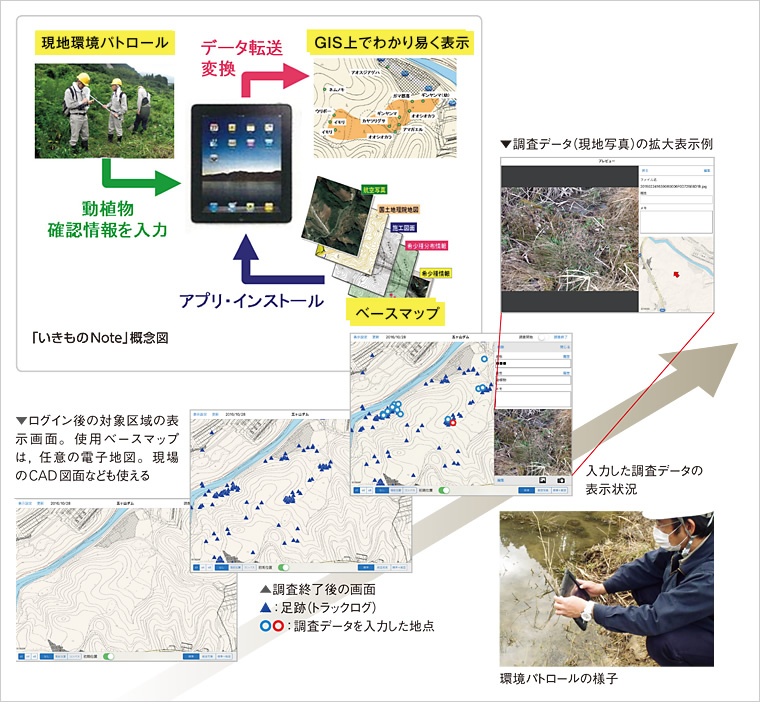
「いきものNote®」
クラウドサーバを用い効率的に動植物データを一元管理
建設工事においては、工事区域とその周辺の動植物や自然環境のモニタリングや保全対策の重要性がますます高まっています。工事の進捗に伴い、日々地形等の状況が変化するため、継続的なモニタリングを行い、実施している環境保全対策を最適化する必要があります。
動植物を中心とした環境モニタリングでは、動植物の写真や調査時刻、分布地点といった情報が必要になりますが、これまではそれぞれの記録方法や媒体が異なり別々に管理していたために、データを一元管理し、わかりやすく表示するには手間と時間、そして、環境の専門知識や長年の経験が必要でした。
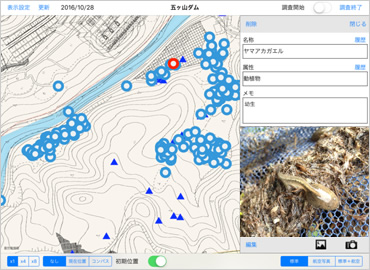
そこで鹿島では、iPad※を用いて効率的かつ精度よく動植物の写真データや位置情報を記録し、電子地図上へマッピングできる「いきものNote」を開発しました。
※iPadは米国Apple,Inc.の登録商標です。
平成27年度ダム工学会賞 技術開発賞

- キーワード
- 生物多様性、環境保全、スマートデバイス、GIS、ダム
特長・メリットココがポイント
「何が・いつ・どこで」が簡単に収集可能
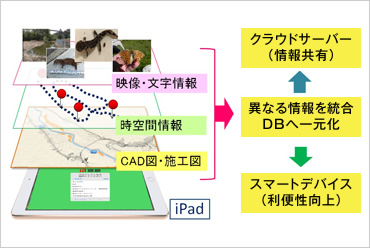
環境パトロールの際に、専用アプリをインストールしたiPadを携行した社員が現場でとらえた動植物の写真をiPad内蔵のカメラで撮影すると、写真データとともに、撮影された時間及び位置データ(緯度経度データ)が自動保存され、地図画面上にわかりやすく表示されます。
クラウドサーバに保存され、効率的に蓄積、検索も容易
取得されたデータは、クラウドサーバに転送・保存されるため、現場担当者のみならず、発注者や本社担当者などと容易に共有することができます。これにより現場の環境対策を多くの専門家で支援することができます。また、ベースマップを現場で使用するCAD図面等を使用することで現場での利便性が向上し、CIMとの連携も容易に行うことができます。
施工中のダム現場で環境モニタリングに適用、有用性を確認
本システムを適用したダム現場では、現場周辺の9か所のビオトープを整備し、工事中の動植物の回復に必要な基盤を再構築するため、現況把握と対策が適切に機能しているかを本システムで確認、有効性を確認しました。
将来はCIMとの連携や災害時対応なども視野に
写真データを簡単に地図にマッピングできることから、環境モニタリングだけでなく、例えば災害時の被災調査などにも威力を発揮します。また、今後はCIMとの連携を進めることで情報の蓄積や共有をさらに高度化・合理化していくことにしています。
適用実績

五ケ山ダム
場所:福岡県那珂川市
竣工年:2018年3月
発注者:福岡県
規模:重力式コンクリートダム 堤高102.5m
堤頂長556m 堤体積93.5万m3
学会論文発表実績
- 「スマートデバイスを使ったダム建設工事における自然環境保全対策管理と保全効果」,第69回土木学会年次学術講演集,Ⅵ部門,633-634,2014年
- 「iPadを使った環境モニタリングシステム”いきものNote”」,土木建設技術発表会2014概要集,126-131,2014年
- 「ダム仮排水路工事における環境保全対策工の管理と発生材の生態系保全対策資材への活用」,第70回土木学会年次学術講演集,Ⅵ部門,565-566,2015年
- 「スマートデバイスを用いた動植物・環境モニタリングシステムのダム工事への適用」,平成27年度ダム工学会 研究発表会・講習会講演集,1-5,2015年
重機周り作業員検知システム
「アラウンドウォッチャー®」
重機と人との接触事故防止を目指したシステム
建設工事では、重機オペレータの死角に作業員が接近する可能性が高く、重機稼働時に重機と作業員が接触して事故を引き起こす恐れがあります。
これまでも重機と作業員の接触事故防止対策としては電波や超音波を利用したものがありましたが、乱反射による誤検知や、受信機と作業員の間に他の重機や機械が入った場合の検知漏れなどの問題があり、トンネルなどの狭い作業空間では十分に機能を果たすことは困難でした。これらの問題を解決するため、磁界を利用したICタグ方式を採用し、魚眼カメラ監視システムを組合せることにより、重機周辺の作業員の接近を適確に把握することを可能とした「アラウンドウォッチャー」を開発しました。
特許登録済

狭隘なトンネル現場でのシステム稼働状況
- キーワード
- 重機接触事故防止、ICタグ、魚眼カメラ監視システム、安全管理、RF-ID、安全装置
システム動作フローと構成主要機器
①ICタグを身に着けた作業員が、重機に搭載した磁界発生装置から発せられる磁界内に侵入すると、ICタグから氏名、所属、IDナンバーなどの「タグ情報」と侵入した磁界に割り振られた「磁界番号」を発信します。
②タグ情報と磁界番号を、重機に搭載した受信アンテナが受けると警報を発します。
③警報表示は、重機に搭載したパトライトが回転し、オペレータ席モニターに誰が検知されたかを表示します。更にモニターには重機周囲全体の魚眼カメラにより重機周りの映像を表示します。
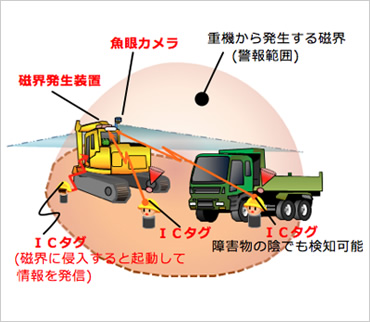
アラウンドウォッチャー概念図

システム構成主要機器
特長・メリットココがポイント
磁界発生装置が作業員を識別
- 検知範囲を磁界で設定し、タグ情報と磁界番号を用いることで、電波や超音波方式のような乱反射による誤検知を防止しています。
- 自機近傍のみに磁界を限定することができるので、複数の重機が輻輳した環境でも使用できます。
- 運転手の持つICタグは、警報からは除外されるため、重機オペレータが頻繁に交代する作業環境でも有効に使用できます。
- 作業員が障害物の陰となる位置に居ても検知できます。
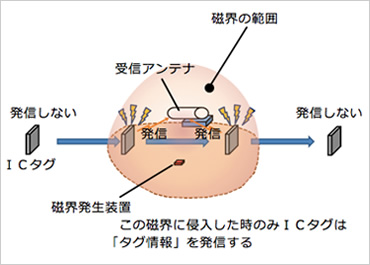
本方式動作範囲
魚眼カメラシステムを併用
- 重機の周囲360度を常にモニター画面で確認できます。
- 重機とICタグで検知された作業員の位置関係を容易に確認できます。
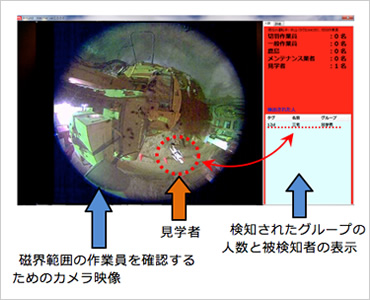
モニター表示画面
適用実績

新東名高速道路徳定トンネル
場所:愛知県新城市
発注者:中日本高速道路
規模:上り線568m 下り線576m
リアルタイム切羽監視システム
多点式高精度距離計を用いてリアルタイムに切羽の安全を監視
山岳トンネル工事では、作業員が切羽に近い位置で作業にあたるため、安全管理上、常に切羽の状況をモニタリングし、地山の目に見えない微妙な変位を監視することが非常に重要です。
高精度レーザ変位計を利用したリアルタイム切羽監視システムは、あらゆる地山に対して、安全かつ高精度に切羽の状況をモニタリングできるシステムです。崩落前の計測結果から切羽崩落の可能性や崩落時刻を予測できるソフトも入れており、事務所でのモニタリング、坑内の避難警告システムを組み合わせることにより、24時間リアルタイムで切羽の安全性を監視することができます。
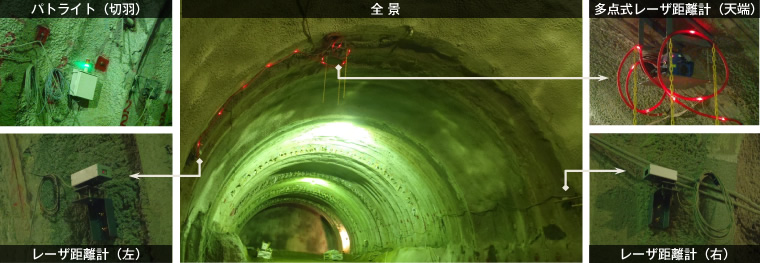
リアルタイム切羽監視システム配置図
- キーワード
- 山岳トンネル、切羽安全監視システム、高精度レーザ距離計、岩盤崩落時刻予測、リアルタイム、多点計測
リアルタイム切羽監視システムの概要
計測装置は「高精度レーザ距離計」と、それを水平方向に高精度で回転可能な「回転制御装置」からなります。そのため、レーザ距離計1台で任意の複数点における切羽押出し変位を高精度に計測することができます。さらに、東京大学大学院福井勝則准教授の提唱する「岩盤崩落予測時刻」を基に設定された管理基準値を用いることにより、切羽の崩壊の可能性や崩落予測時間をリアルタイムに予測することができます。この管理基準値は実際に鹿島の山岳トンネル現場における切羽押出し変位データを基に、その有効性を検証しています。これらの開発により、従来手法では予測が難しかった突発的な崩壊の可能性がある中硬岩地山や土砂地山も含め、あらゆる地山に対して、切羽の安全性をリアルタイムで評価することが可能となりました。また、レーザ距離計のターゲットの代わりに特殊スプレーを用いることで、計測作業の安全性・効率性を向上させることが可能となりました。
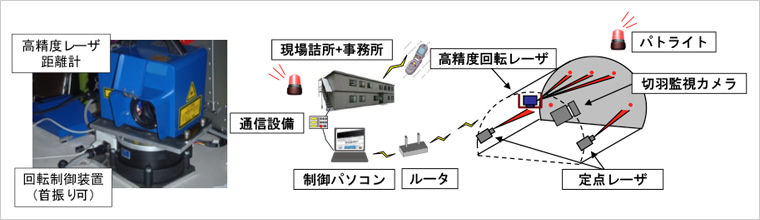
装置外観とリアルタイム切羽監視システム概要図
特長・メリットココがポイント
突発的崩落の可能性のある地山にも対応が可能
高精度レーザ距離計による常時計測により、従来では対応できなかった突発的な崩落の可能性がある地山にも対応が可能となりました。
- 従来技術に比べ、約10分の1の誤差で計測可能です。(計測精度:約±0.3mm)
- 回転制御装置、または複数台設置による多点監視が可能です。
- 特殊スプレーの使用により、ノンターゲットの吹付面であっても、ターゲット使用時と同等の計測精度を実現し、効率性・安全性の向上を達成しました。
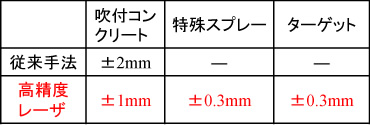
従来手法との精度比較表
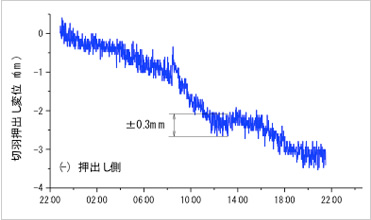
1日間での計測結果
リアルタイムに「岩盤崩落時刻」を算出
切羽の変位から変位速度・変位速度の逆数を評価することで、リアルタイムに「岩盤崩落時刻」を算出する手法を用いました。
- 切羽崩落前の変位速度の加速度的上昇傾向に着目し、変位速度の逆数=「0」となる崩落時刻を算出します。
- 実トンネルの崩落データで精度検証済みです。
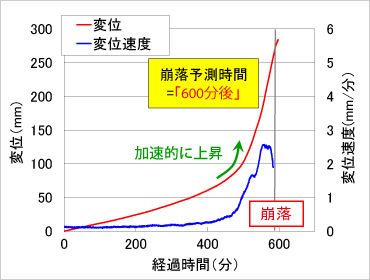
切羽変位および変位速度

切羽崩落時の様子
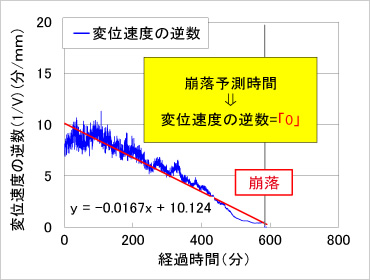
変位速度の逆数と崩落予測
学会論文発表実績
- 「多点式高精度レーザー距離計によるトンネル切羽変位計測」,第47回地盤工学研究発表会,2012年
- 「突発的な切り羽崩落を高精度に予測」,日経コンストラクション,8月27日号,2012年
AIを活用した危険予知活動支援システム
「鹿島セーフナビ®(K-SAFE®)」
過去の膨大な災害事例を解析し災害傾向を見える化!
建設現場では、作業開始前にこれから行う作業に対して、起こり得る災害を予測し対策を立案する「危険予知活動」を必ず行います。この活動は通常、作業担当者の経験・感覚・知識を基に実施されますが、災害の知識が少ない場合などは的確な安全指示が出来ずに危険予知活動が形骸化し、労働災害のリスク低減が不十分になることも起こり得ます。
また、過去の膨大な災害事例の中から類似した事例を探し出すには多くの手間と時間がかかります。さらに、災害事例に記載された内容は「自然言語(自由に記述された文章)」であるため、その作業においてどのような原因で災害が起こったのかという「災害傾向」を精度よく把握するには、人が読み解く必要があり、膨大な災害事例データを効率的に活用することは永年の課題でした。
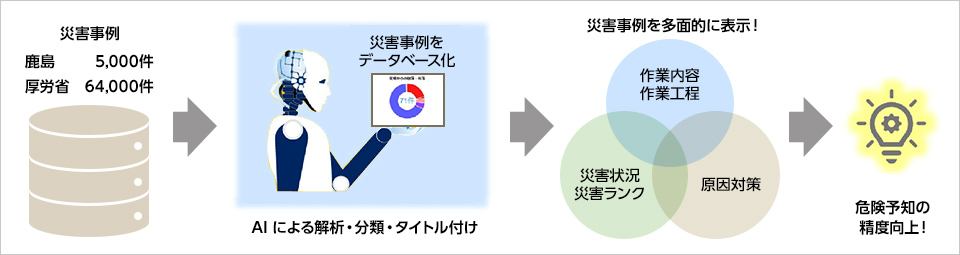
そこで、鹿島では膨大な災害事例をデータベース化し、AIにより解析し、類似作業の災害事例を見える化することで災害傾向を提示し、危険予知の精度向上に貢献するシステム「鹿島セーフナビ®(K-SAFE®)」を開発しました。
特許登録済
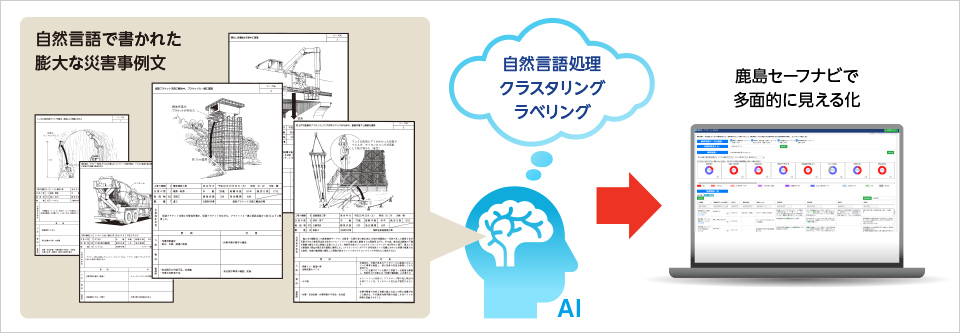
「鹿島セーフナビ」のイメージ
関連情報
- キーワード
- 災害事例、AI、自然言語処理、危険予知
本システムの概要
鹿島セーフナビ(K-SAFE)は、鹿島が保有する災害事例、厚生労働省の「職場のあんぜんサイト」で公開されている災害事例、日建連が会員に提供している災害事例(合計約70,000件)※をAI(自然言語処理技術)により解析し、類似作業の災害事例を多面的に見える化するシステムです。
※災害事例は随時追加されています。
記入欄に作業内容(キーワードや文章)を記入し、解析実行ボタンをクリックすると、「入力した作業内容」と「AIがクラスタリングやラベリングをした過去の災害事例」とを照合し、解析結果を災害原因別や災害状況別にグラフ表示します。表示されたグラフは重篤度により色別で表示します。ラベルやグラフに含まれる災害事例の詳細は一覧で表示します。
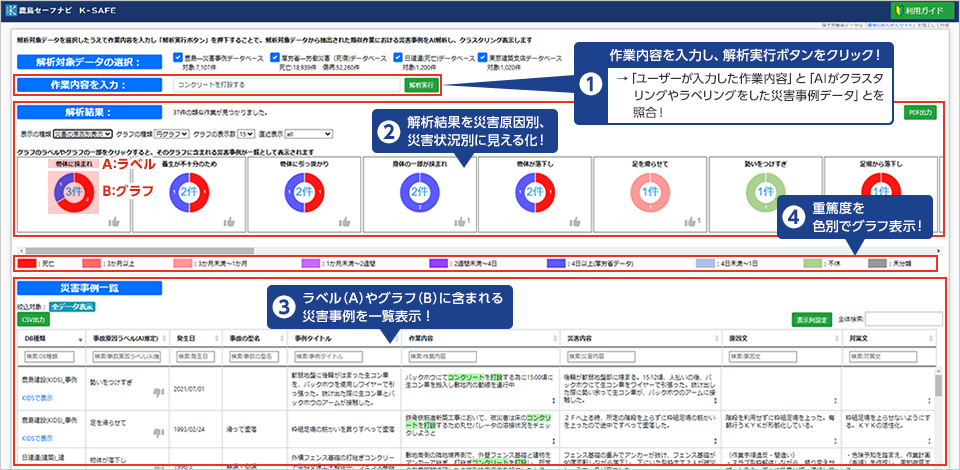
K-SAFEの表示例
グラフ表示を切り替えることで、該当作業に関連する過去の災害発生状況を年度別に確認することもできます。

グラフ表示を年度別に切替
鹿島保有の災害事例の詳細は「絵入りの事例シート」で確認できます。
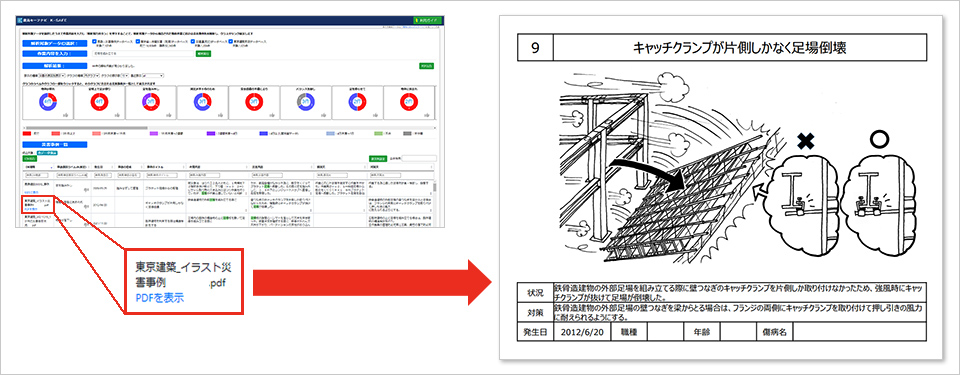
絵入りの事例シートで確認
鹿島セーフナビは、PC、スマートフォン(iPhone)、タブレット(iPad)など、様々な端末で操作できます。
PCで鹿島セーフナビを利用し災害傾向を把握

iPadで鹿島セーフナビを利用し危険予知活動を実施
特長・メリットココがポイント
膨大な災害事例の中から必要な災害事例について素早く解析
約70,000件に及ぶ膨大な災害事例(鹿島が保有する災害事例、厚生労働省の公開している災害事例、日建連が会員会社に提供している災害事例)からAIが瞬時に解析を行います。社内だけでなく、社外のデータからも災害傾向を客観的に分析することができます。
災害事例を客観的に把握
様々なシーンで危険予知精度の向上を支援
社員は、施工前の事前検討会、朝礼後の危険予知活動、会社の安全管理者による安全パトロール、毎月行われる災害防止協議会や安全教育などでK-SAFEを利用することで「こんな危険もあるんだ」という気づきを得るなど、様々なシーンで危険予知精度の向上を支援します。

様々な活用シーン
適用実績
![]()
土木・建築問わず、様々な現場で活用中です。
学会論文発表実績
- 「AIを活用した危険予知活動支援システム「K-SAFE®」の開発」,建設機械施工,2022年5月
- 「AIを活用した危険予知活動支援システムの開発」,令和4年度土木学会全国大会,第77回年次学術講演会,2022年
どこでも安全アプリ®
スマートフォンで手軽に安全教育!
鹿島は安全を最優先に現場運営を行っており、労働災害と事故の撲滅に向けて建設現場での安全教育を積極的に実施していますが、従来の安全教育は紙媒体が中心で、教育に要する時間がかかる他、管理者側の準備や採点、集計作業の効率化などに課題がありました。
そこで鹿島は「みんなで学ぼう建設安全! どこでも安全アプリ」を開発し、建設作業員が自分自身のスマートフォンを利用して、安全教育を手軽に受講できるようにしました。
本アプリでは全現場に共通する100の基礎的な設問を提供しています。建設作業員は設問画面上で4択形式により解答でき、解答の正誤判定、解説によるフィードバックを即座に行うことができます。また、安全教育に関する準備や採点業務が不要になり、安全管理者の負担を大幅に軽減しました。
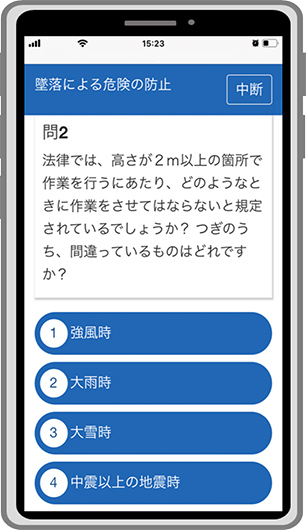
安全アプリ画面
- キーワード
- 安全教育、スマートデバイス、ペーパーレス、クラウド
本システムの概要
本システムはデバイスを選ばないWebアプリケーション形式となっており、「建設作業員が教育を受講する環境」と「安全管理者が進捗状況等を管理する環境」の2つで構成されています。
建設作業員はQRコードを読み込んで教育環境にログインし、アプリ上で設問に解答すると、即座に正誤判定・解説の表示が行われ、自身の解答へのフィードバックを受けられます。クラウド上ではユーザごとの進捗状況・正答率がリアルタイムで表示されるため、安全管理者は建設作業員が持つ安全知識の水準を把握することができ、日々の安全な現場運営活動に役立てることが可能になります。
アプリのUI(ユーザーインターフェース)はスマートフォンに不慣れな建設作業員でもシンプルで使いやすいものとなるよう、ボタンの大きさ・デザインを工夫しており、建設作業員自身がスマートフォンで楽しみながら、確実に安全教育を実施する事ができます。
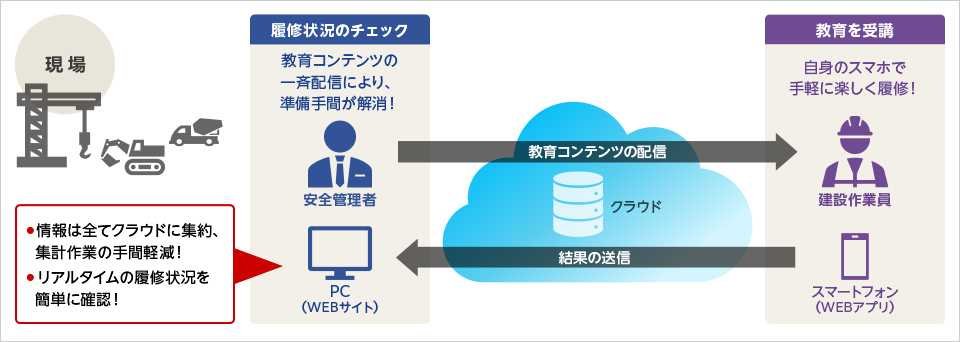
システム全体図
特長・メリットココがポイント
スマホのみで安全教育を実施
スマートフォンから簡単にアクセス可能なため、インターネット環境があればどこからでも簡単に受講可能です。選択式の設問のみのため、難しい操作は一切不要となっています。解答するとすぐに採点され、解答に合わせた画像と一緒に解説文章が表示されるため、効率的に知識の定着を図ることが出来ます。

履修までのイメージ
履修状況の管理機能
解答結果は即時クラウドにアップロードされ、自動集計されます。集計された建設作業員別・設問別の進捗率と正答率から、安全知識の浸透を評価できます。全データはCSV形式で出力可能であるため、グラフ化やデータ分析も可能です。
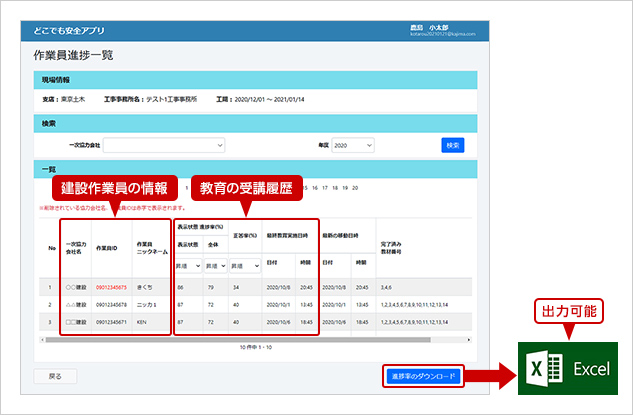
管理画面イメージ
意欲的に安全教育を受講してもらえる各種機能
受動的になりがちな安全教育を、主体的かつ意欲的に実施してもらえるようにUIやシステムの仕組みを工夫しています。UIに関しては操作方法で躓かないようにシンプルなデザインとしています。さらに、自身の受講進捗に合わせて現場内でのランキングが表示されるため、競争意欲を刺激しながら、楽しんで教育を受けてもらえるようになっています。

ランキング機能
学会論文発表実績
- 「スマートフォンを活用した建設現場の技能労働者向け安全教育アプリの開発」,土木学会,第77回年次学術講演会,2022年
